Главная / Алгоритмы и дискретные структуры /
Введение в математическое моделирование / Тест 12
Упражнение 1:
Номер 1
Какие системы называют динамическими?
Ответ:
(1) системы, в которых выходные переменные являются функциями от времени или каких–либо других параметров
(2) системы, в которых входные переменные являются функциями от времени или каких–либо других параметров
(3) системы, в которых входные переменные являются константными значениями
(4) системы, в которых выходные переменные являются константными значениями
Номер 2
Какими уравнениями описываются динамические системы?
Ответ:
(1) дифференциальными
(2) интегральными
(3) в виде многочлена степени n
(4) нет правильного ответа
Номер 3
Как выглядит формула Ньютона-Лейбница?
Ответ:
(1) 
(2) 
(3) 
(4) 
Упражнение 2:
Номер 1
В каких случаях применяются численные методы интегрирования?
Ответ:
(1) подынтегральная функция f(x) задана таблично на участке [a,b]
(2) подынтегральная функция f(x) задана аналитически, но ее первообразная выражается через элементарные функции
(3) подынтегральная функция f(x) задана аналитически, имеет первообразную, но ее определение слишком сложно
Номер 2
К каким методам относятся численные методы по характеру результата?
Ответ:
(1) точным
(2) приближенным
(3) нет правильного ответа
Номер 3
Какой шаг при вычислении интеграла численными методами необходимо выполнить вторым?
Ответ:
(1) в каждой части деления подынтегральную функцию f(x) аппроксимируют интерполяционным многочленом. Степень многочлена n = 0,1,2…
(2) весь участок [a,b] делят на n равных частей с шагом h=(b-a)/n
(3) для каждой части деления определяют площадь частичной криволинейной трапеции
(4) суммируют площади частичных криволинейных трапеций
Упражнение 3:
Номер 1
Как называется нахождение приближенного значения интеграла?
Ответ:
(1) сплайн
(2) кубический сплайн
(3) квадратура
Номер 2
По какой формуле вычисляется остаточный член?
Ответ:
(1) 
(2) 
(3) 
Номер 3
Что называется остаточным членом?
Ответ:
(1) разность между точным и приближенным значением интеграла
(2) разность между приближенным и точным значением интеграла
(3) сумма приближенного и точного значений интеграла
(4) погрешностью квадратурной формулы
Упражнение 4:
Номер 1
В каком случае квадратурная формула называется формулой прямоугольников, а метод – методом прямоугольников?
Ответ:
(1) если в каждой из частей деления интервала [a,b] подынтегральная функция аппроксимируется многочленом нулевой степени, т.е. прямой, параллельной оси OX
(2) если в каждой из частей деления интервала [a,b] подынтегральная функция аппроксимируется многочленом первой степени, т.е. прямой, соединяющей две соседние узловые точки
(3) если в каждой из частей деления интервала [a,b] подынтегральная функция аппроксимируется многочленом второй степени
Номер 2
В каком случае квадратурная формула называется формулой трапеций, а метод – методом трапеций?
Ответ:
(1) если в каждой из частей деления интервала [a,b] подынтегральная функция аппроксимируется многочленом нулевой степени, т.е. прямой, параллельной оси OX
(2) если в каждой из частей деления интервала [a,b] подынтегральная функция аппроксимируется многочленом первой степени, т.е. прямой, соединяющей две соседние узловые точки
(3) если в каждой из частей деления интервала [a,b] подынтегральная функция аппроксимируется многочленом второй степени
Номер 3
В каком случае квадратурная формула называется формулой Симпсона, а метод – методом Симпсона?
Ответ:
(1) если в каждой из частей деления интервала [a,b] подынтегральная функция аппроксимируется многочленом первой степени, т.е. прямой, соединяющей две соседние узловые точки
(2) если в каждой из частей деления интервала [a,b] подынтегральная функция аппроксимируется многочленом второй степени
(3) если в каждой из частей деления интервала [a,b] подынтегральная функция аппроксимируется многочленом нулевой степени, т.е. прямой, параллельной оси OX
Упражнение 5:
Номер 1
Какой вид имеет квадратурная формула, если высота каждого частичного прямоугольника равна значению подынтегральной функции в левых концах каждого шага?
Ответ:
(1) 
(2) 
(3) нет правильного ответа
Номер 2
Какой порядок имеет точность метода трапеций?
Ответ:
(1) h
(2) h2
(3) h3
(4) h4
Номер 3
Чем аппроксимируется подынтегральная функция в каждой части деления в методе Симпсона?
Ответ:
(1) квадратичной параболой
(2) кубическим сплайном
(3) многочленом степени n
(4) нет правильного ответа
Упражнение 6:
Номер 1
Что отражает параметрN2в формуле по методу Симпсона?
Ответ:
(1) заданную точность
(2) число шагов
(3) количество частей деления
(4) нет правильного ответа
Номер 2
Формула Ньютона-Лейбница используется
Ответ:
(1) для решения систем нелинейных уравнений
(2) для численного интегрирования
(3) для численного дифференцирования
(4) для решения систем линейных уравнений
Номер 3
В каком случае невозможно применить численный метод интегрирования?
Ответ:
(1) подынтегральная функция f(x) задана аналитически, имеет первообразную, но ее определение слишком сложно
(2) подынтегральная функция f(x) задана таблично на участке [a,b]
(3) подынтегральная функция f(x) задана на участке [a,b] таблично, но интеграл ищется на другом участке
(4) подынтегральная функция f(x) задана аналитически, но ее первообразная не выражается через элементарные функции
Упражнение 7:
Номер 1
Численные методы интегрирования являются
Ответ:
(1) точными
(2) приближенными
(3) эвристическими
(4) аналитическими
Номер 2
Квадратурой называется
Ответ:
(1) приближенное значение интеграла
(2) усредненный квадрат интеграла
(3) квадрат интеграла
(4) среднее значение между интегралом и функцией в данной точке
Номер 3
Какую необходимо брать высоту прямоугольника в методе прямоугольников на интервале [a,b] в общем случае?
Ответ:
(1) значение функции в точке a
(2) значение функции в точке b
(3) значение функции в точке (b-a)/2
(4) значение функции либо в точке a, либо в точке b
(5) все варианты равнозначны
Упражнение 8:
Номер 1
Какое количество шагов надо выполнить, чтобы проинтегрировать методом прямоугольников функцию на отрезке[a,b]с шагомh?
Ответ:
(1) (a+b)/h
(2) (b-a)/h
(3) h
(4) b-a
Номер 2
Какая максимальная степень степенного подынтегральной многочлена должна быть, чтобы гарантировать безошибочное вычисление интеграла методом трапеций?
Ответ:
(1) 1
(2) 2
(3) 3
(4) любая
(5) ошибка аппроксимации будет всегда
Номер 3
Укажите какого порядка будет максимальная ошибка метода Симпсона
Ответ:
(1) 1
(2) 2
(3) 3
(4) 4
Упражнение 9:
Номер 1
Какой из параметров не влияет на ошибку методов Симпсона, трапеций и прямоугольников?
Ответ:
(1) производная подынтегральной функции на данном интервале
(2) максимальное значение подынтегральной функции
(3) размер выбранного шага
Номер 2
Какой из методов имеет большее количество шагов?
Ответ:
(1) прямоугольников
(2) трапеций
(3) Симпсона
(4) трапеций и Симпсона
(5) все имеют одинаковое
Номер 3
Как выглядит общий вид дифференциального уравнения?
Ответ:
(1) F(x,y,y') = 0
(2) F(x,y,y') = 1
(3) F(x,y,y') = -1
(4) F(x,y,y') = N
Упражнение 10:
Номер 1
Как выглядит нормальная форма дифференциального уравнения?
Ответ:
(1) y = f'(x,y)
(2) y' = f(x,y)
(3) y' = f'(x,y)
(4) нет правильного ответа
Номер 2
Чему равна правая часть (f(x,y)) дифференциального уравнения, представленного в нормальной форме?
Ответ:
(1) функции y(x)
(2) первой производной функции y(x)
(3) первообразной функции y(x)
(4) второй производной функции y(x)
Номер 3
Как называется дифференциальное уравнения, если функция у зависит от нескольких аргументов?
Ответ:
(1) частное дифференциальное уравнение
(2) нормальная форма дифференциального уравнения
(3) дифференциальное уравнение в частных производных
Упражнение 11:
Номер 1
Что является общим решением обыкновенного дифференциального уравнения y' = f(x,y)?
Ответ:
(1) семейство функций у=у(х,с)
(2) функция у=у(х)
(3) функция у=с
(4) нет правильного ответа
Номер 2
Что называется задачей Коши?
Ответ:
(1) нахождение частного решения дифференциального уравнения y' = f(x,y)
(2) нахождение частного решения дифференциального уравнения y' = f(x,y), удовлетворяющего начальному условию 
(3) нахождение частного решения дифференциального уравнения y = f(x,y)
(4) нахождение частного решения дифференциального уравнения y = f(x,y), удовлетворяющего начальному условию
Номер 3
Что такое h в постановке задачи Коши в численных методах?
Ответ:
(1) начало участка интегрирования уравнения
(2) конец участка интегрирования уравнения
(3) число шагов интегрирования уравнения
(4) шаг интегрирования дифференциального уравнения
Упражнение 12:
Номер 1
На чем основаны методы Рунге–Кутта?
Ответ:
(1) на аппроксимации искомой функции у(х) в пределах каждого шага многочленом, который получен при помощи разложения функции у(х) в окрестности шага h каждой i-ой точки в ряд Тейлора: 
(2) на аппроксимации искомой функции у(х) в пределах каждого шага многочленом, который получен при помощи разложения функции у(х) в окрестности шага h каждой i-ой точки в ряд Тейлора: 
(3) на аппроксимации искомой функции у(х) в пределах каждого шага многочленом, который получен при помощи разложения функции у(х) в ряд Тейлора: 
Номер 2
Как еще называется метод Эйлера?
Ответ:
(1) метод Рунге–Кутта первого порядка
(2) метод Рунге–Кутта второго порядка
(3) метод Рунге–Кутта четвертого порядка
Номер 3
Как выглядит формула Эйлера?
Ответ:
(1) 
(2) 
(3) 
(4) нет правильного ответа
Упражнение 13:
Номер 1
Чему равна точность метода Эйлера на каждом шаге?
Ответ:
(1) 
(2) 
(3) 
(4) 
Номер 2
Чему равен в графическом представлении метода Эйлера наклон касательной в пределах каждого шага?
Ответ:
(1) значению производной y'(x) в начальной точке шага xi
(2) шагу интегрирования дифференциального уравнения
(3) точности метода Эйлера
(4) количеству шагов интегрирования дифференциального уравнения
Номер 3
Как выглядит модифицированная или уточненная формула Эйлера?
Ответ:
(1)
(2)
(3) 
(4) 
Упражнение 14:
Номер 1
В какое количество этапов группируются все вычисления на каждом шаге по модифицированной или уточненной формуле Эйлера для определения предварительного значения ?
Ответ:
(1) 2
(2) 3
(3) 4
(4) 5
Номер 2
Чему равна точность модифицированного метода Эйлера на каждом шаге?
Ответ:
(1)
(2)
(3)
(4)
Номер 3
Каким количеством прямых аппроксимируется функция у(х) на каждом шаге в модифицированном методе Эйлера?
Ответ:
(1) 1
(2) 2
(3) 3
(4) 4
Упражнение 15:
Номер 1
Какой из всех численных методов решения дифференциальных уравнений с помощью ЭВМ получил самое большое распространение?
Ответ:
(1) метод Рунге-Кутта 1-го порядка
(2) метод Эйлера
(3) модифицированный метод Эйлера
(4) метод Рунге-Кутта 4-го порядка
Номер 2
Чему равна ошибка на каждом шаге интегрирования дифференциальных уравнений в методе Рунге-Кутта 4-го порядка?
Ответ:
(1) h2
(2) h3
(3) h4
(4) h5
Номер 3
Чем аппроксимируется искомая функция y(x) на каждом шаге интегрирования дифференциальных уравнений в методе Рунге-Кутта 4-го порядка?
Ответ:
(1) рядом Тейлора, содержащим члены ряда с h2
(2) рядом Тейлора, содержащим члены ряда с h3
(3) рядом Тейлора, содержащим члены ряда с h4
Упражнение 16:
Номер 1
Производные функцииy(x)каких порядков необходимо определить для сохранения членов ряда, содержащихh2 , h3,h4?
Ответ:
(1) y'',y''',y(4)
(2) y', y'',y'''
(3) y'',y'''
(4) y', y''
Номер 2
Решение дифференциального уравнения 1-го порядка представляется как
Ответ:
(1) аналитическая функция
(2) табличная функция
(3) графическая функция
Номер 3
Метод Эйлера это:
Ответ:
(1) метод Рунге-Кутта 2-го порядка
(2) метод Рунге-Кутта 1-го порядка
(3) метод Рунге-Кутта 4-го порядка
Упражнение 17:
Номер 1
Модифицированный метод Эйлера это:
Ответ:
(1) метод Рунге-Кутта 2-го порядка
(2) метод Рунге-Кутта 1-го порядка
(3) метод Рунге-Кутта 4-го порядка
Номер 2
Методы Рунге-Кутта получены при помощи разложения функции в ряд
Ответ:
(1) Маклорена
(2) Тейлора
(3) Эйлера
Номер 3
Точность h метода эйлера имеет порядок
Ответ:
(1) 4
(2) 3
(3) 2
Упражнение 18:
Номер 1
Точность h метода Рунге-Кутта 4-го порядка
Ответ:
(1) 4
(2) 3
(3) 2
Номер 2
Точность h модифицированного метода Эйлера
Ответ:
(1) 4
(2) 3
(3) 2
Номер 3
Какой метод считается более точным
Ответ:
(1) Эйлера
(2) Рунге-Кутта 4-го порядка
(3) модифицированный метод Эйлера
Упражнение 19:
Номер 1
Как добиться того чтобы результаты по методу Эйлера, модифицированному методу Эйлера и методу Рунге-Кутта 4-го порядка были почти одинаковыми
Ответ:
(1) увеличивая шаг интегрирования
(2) уменьшая шаг интегрирования
(3) удваивая шаг интегрирования
Номер 2
Для решения дифференциальных уравнений 1-го порядка необходимо
Ответ:
(1) начальное значение x, начальное значение y, шаг интегрирования h, конец интервала b
(2) начальное значение x, конечное значение y, шаг интегрирования h
(3) начальное значение x, начальное значение y, конец интервала b
Номер 3
К какой системе можно свести любое дифференциальное уравнение m–го порядка при помощи замен?
Ответ:
(1) к системе, состоящей из m-1 уравнения первого порядка
(2) к системе, состоящей из m уравнений первого порядка
(3) к системе, состоящей из m+1 уравнения первого порядка
Упражнение 20:
Номер 1
Что является решением дифференциального уравнения m-го порядка?
Ответ:
(1) решение системы, состоящей из m дифференциальных уравнений первого порядка
(2) решение системы, состоящей из m-1 дифференциального уравнения первого порядка
(3) m табличных функций y, y1=y', y2=y''1, … , ym=y(m-1)
(4) m-1 табличная функция y, y1=y', y2=y''1, … , ym-1=y(m-2)
Номер 2
Как выглядят дифференциальные уравнения второго порядка в общем виде?
Ответ:
(1) f(x) = 0
(2) F(x,y)= 0
(3) F(x,y,y')= 0
(4) F(x,y,y',y'')= 0
Номер 3
Как выглядит нормальная форма дифференциальных уравнений второго порядка?
Ответ:
(1) y'=f(x,y)
(2) y”=f(x,y')
(3) y”=f(x,y,y')
(4) y”'=f(x,y,y'')
Упражнение 21:
Номер 1
Как звучит постановка в численных методах задача Коши для системыy(x)с учетом двух начальных условия:y(x0)=y0, y1(x0)=(y1)0?
Ответ:
(1) найти табличные функции y(x) и (y1)(x), 
(2) найти табличные функции y(x) и (y1)(x), 
(3) нет правильного ответа
Номер 2
Что является решением задачи Коши для системы, состоящей из двух дифференциальных уравнений первого порядка, на графике?
Ответ:
(1) узловая точка
(2) совокупность узловых точек
(3) не существует решения задачи Коши на графике
Номер 3
Какое условие необходимо соблюдать на каждом шаге интегрирования при применении для решения системы дифференциальных уравнений тех же методов, что и для решения одного дифференциального уравнения первого порядка?
Ответ:
(1) все уравнения системы необходимо решать последовательно
(2) все уравнения системы необходимо решать параллельно
(3) нет правильного ответа
Упражнение 22:
Номер 1
Матрица какого размера получится при решении дифференциального уравненияm-го порядка (при этом каждая из табличных функций определяется на промежутке[a, b]с шагомhи включаетnузловых точек)?
Ответ:
(1) n-1 m-1
(2) n m
(3) n+1 m+2
Номер 2
Что представляет собой каждаяi–ая строка матрицы, полученной при решении дифференциального уравненияm-го порядка?
Ответ:
(1) массив решений m табличных функций на одном i–ом шаге интегрирования
(2) массив решений m-1 табличной функций на одном i–ом шаге интегрирования
(3) массив решений одной j-й табличной функции по всем n шагам интегрирования
(4) массив решений одной j-й табличной функции по всем n-1 шагам интегрирования
Номер 3
Что является решением дифференциального уравнения m-го порядка на графике?
Ответ:
(1) одна узловая точка
(2) 2 узловые точки
(3) n m узловых точек
(4) не существует решения задачи на графике
Упражнение 23:
Номер 1
Дифференциальное уравнение высоких порядков можно
Ответ:
(1) решить методами Гаусса
(2) решить методами Рунге-Кутта
(3) решить методами Ньютона
Номер 2
Чтобы решить дифференциальное уравнение высоких порядков мы их приводим к системе
Ответ:
(1) дифференциальных уравнений m-го порядка
(2) нелинейных уравнений
(3) дифференциальных уравнений 1-го порядка
Номер 3
При использовании методов Рунге-Кутта для решения дифференциальных уравнений высоких порядков на каждом шаге интегрирования все уравнения системы решаются
Ответ:
(1) перпендикулярно
(2) параллельно
(3) независимо
Упражнение 24:
Номер 1
Для решения дифференциальных уравнений n-го порядка задача Коши это
Ответ:
(1) начальное значение x, начальное значение y, шаг интегрирования h, конец интервала b
(2) начальное значение x, начальное значение y, y', …, y , шаг интегрирования h, конец интервала b
(3) начальное значение x, начальное значение y, y', …, y , конец интервала b
Номер 2
Решение дифференциальных уравнений n-го порядка представляются как
Ответ:
(1) аналитическая функция
(2) табличная функция
(3) графическая функция
Номер 3
Если целевая функция и функция ограничений известны, то это методы
Ответ:
(1) интерполяции
(2) оптимизации
(3) аппроксимации
Упражнение 25:
Номер 1
В прямых методах оптимизации при поиске экстремума используются
Ответ:
(1) значения первых производных функции
(2) наряду с первыми и значения вторых производных функции
(3) только значения целевой функции
Номер 2
В градиентных методах используются
Ответ:
(1) значения первых производных функции
(2) наряду с первыми и значения вторых производных функции
(3) только значения целевой функции
Номер 3
В градиентных методах 2-го порядка используются
Ответ:
(1) значения первых производных функции
(2) наряду с первыми и значения вторых производных функции
(3) только значения целевой функции
Упражнение 26:
Номер 1
Метод дихотомии является методом
Ответ:
(1) прямого поиска
(2) градиентным методом первого порядка
(3) градиентным методом второго порядка
Номер 2
Метод "золотого сечения" является методом
Ответ:
(1) прямого поиска
(2) градиентным методом
(3) градиентным методом второго порядка
Номер 3
В методе дихотомии, если F(x-E)<F(x+E), то для определения min выбирается отрезок
Ответ:
(1) [(a+b)/2, b]
(2) [a, (a+b)/2]
(3) [(a+b)/2-E, (a+b)/2+E]
Упражнение 27:
Номер 1
Метод дихотомии это
Ответ:
(1) однопараметрический метод
(2) метод условной оптимизации
(3) метод многомерной оптимизации
Номер 2
В методе дихотомии еслиF(x-E)>F(x+E), то для определенияminвыбирается отрезок
Ответ:
(1) [(a+b)/2, b]
(2) [a, (a+b)/2]
(3) [(a+b)/2-E, (a+b)/2+E]
Номер 3
В методе дихотомии еслиF(x-E)<F(x+E), то для определенияmaxвыбирается отрезок
Ответ:
(1) [(a+b)/2, b]
(2) [a, (a+b)/2]
(3) [(a+b)/2-E, (a+b)/2+E]
В каком случае квадратурная формула называется формулой прямоугольников, а метод – методом прямоугольников?
- если в каждой из частей деления интервала [a,b] подынтегральная функция аппроксимируется многочленом второй степени
- (Правильный ответ) если в каждой из частей деления интервала [a,b] подынтегральная функция аппроксимируется многочленом нулевой степени, т.е. прямой, параллельной оси OX
- если в каждой из частей деления интервала [a,b] подынтегральная функция аппроксимируется многочленом первой степени, т.е. прямой, соединяющей две соседние узловые точки
Для изучения каких систем используется аналитическое моделирование?
- (Правильный ответ) сравнительно простых
- любых
- сложных
Какие формулы применяются в методе полярных координат для вычисления независимых нормально распределенные случайных величин x1 и x2?
- (Правильный ответ)
В каком случае квадратурная формула называется формулой Симпсона, а метод – методом Симпсона?
- (Правильный ответ) если в каждой из частей деления интервала [a,b] подынтегральная функция аппроксимируется многочленом второй степени
- если в каждой из частей деления интервала [a,b] подынтегральная функция аппроксимируется многочленом нулевой степени, т.е. прямой, параллельной оси OX
- если в каждой из частей деления интервала [a,b] подынтегральная функция аппроксимируется многочленом первой степени, т.е. прямой, соединяющей две соседние узловые точки
Как выглядит формула Эйлера?
- нет правильного ответа
- (Правильный ответ)
Какая функция равномерного распределения существует?
- (Правильный ответ) дифференциальная и интегральная функции
- только интегральная функция
- только дифференциальная функция
Что требуется для нахождения объективных и устойчивых характеристик процесса при статистическом моделировании?
- одинарное воспроизведение процесса
- многократное воспроизведение процесса, с последующей статической обработкой полученных данных
- (Правильный ответ) многократное воспроизведение процесса, с последующей статистической обработкой полученных данных
Укажите более точное определение имитационных моделей:
- имитационные модели имитируют разброс опытных данных
- имитационные модели имитируют численное решение модели
- (Правильный ответ) имитационные модели имитируют поведение реальных объектов, процессов или систем
Как называется отношение ?
- разделенной разностью второго порядка
- разделенной разностью нулевого порядка
- (Правильный ответ) разделенной разностью первого порядка
Чем аппроксимируется искомая функция y(x) на каждом шаге интегрирования дифференциальных уравнений в методе Рунге-Кутта 4-го порядка?
- (Правильный ответ) рядом Тейлора, содержащим члены ряда с h4
- рядом Тейлора, содержащим члены ряда с h2
- рядом Тейлора, содержащим члены ряда с h3
В градиентных методах 2-го порядка используются
- наряду с первыми и значения вторых производных функции
- (Правильный ответ) только значения целевой функции
- значения первых производных функции
Что такое математическая модель?
- точное представление реальных объектов, процессов или систем, выраженное в физических терминах и сохраняющее существенные черты оригинала
- приближенное представление реальных объектов, процессов или систем, выраженное в физических терминах и сохраняющее существенные черты оригинала
- (Правильный ответ) приближенное представление реальных объектов, процессов или систем, выраженное в математических терминах и сохраняющее существенные черты оригинала
- точное представление реальных объектов, процессов или систем, выраженное в математических терминах и сохраняющее существенные черты оригинала
Какой закон называют нормальным законом распределения вероятностей непрерывной случайной величины?
- закон распределения вероятностей непрерывной случайной величины, который описывается дифференциальной функцией , где a — среднее квадратичное отклонение нормального распределения, — математическое ожидание случайной величины
- (Правильный ответ) закон распределения вероятностей непрерывной случайной величины, который описывается дифференциальной функцией , где a — математическое ожидание случайной величины, -среднее квадратичное отклонение нормального распределения
- закон распределения вероятностей непрерывной случайной величины, который описывается дифференциальной функцией , где a – дисперсия случайной величины, — математическое ожидание случайной величины
Что означает сокращенное обозначение модели СДА?
- стохастическая, детерминированная, аналитическая
- дискретная, стохастическая, аналитическая
- (Правильный ответ) стохастическая, дискретная, аналитическая
Какой из шагов не входит в состав исследования объекта, процесса или системы и составления их математического описания при математическом моделировании, но является частью математического моделирования?
- выделение наиболее существенных черт и свойств реального объекта или процесса
- определение внешних связей и описание их с помощью ограничений, уравнений, равенств, неравенств, логико-математических конструкций
- (Правильный ответ) построение алгоритма, моделирующего поведение объекта, процесса или системы
- определение переменных, т.е. параметров, значения которых влияют на основные черты и свойства объекта
В сколько этапов реализуется метод Ньютона?
- один
- три
- (Правильный ответ) два
- зависит от количества уравнений
Как выглядит формула Ньютона-Лейбница?
- (Правильный ответ)
Какой из способов аппроксимации данных нашел большее применение на практике?
- нет правильного ответа
- способ, который требует, чтобы аппроксимирующая кривая F(x), аналитический вид которой необходимо найти, не проходила ни через одну узловую точку таблицы
- способ, который требует, чтобы аппроксимирующая кривая F(x), аналитический вид которой необходимо найти, проходила через все узловые точки таблицы
- (Правильный ответ) способ, заключающийся в сглаживании опытных данных
Из какого количества этапов состоит метод Гаусса?
- (Правильный ответ) 2
- 5
- 3
- 4
По какой формуле интерполяционный многочлен имеет вид:
- (Правильный ответ) Лагранжа
- Ньютона
- Стерлинга
- Бесселя
Какая модель не является плодом человеческой мысли в общем случае?
- математическая
- физическая
- знаковая
- наглядная
- (Правильный ответ) натурная
В методе дихотомии, если F(x-E)<F(x+E), то для определения min выбирается отрезок
- [(a+b)/2, b]
- (Правильный ответ) [a, (a+b)/2]
- [(a+b)/2-E, (a+b)/2+E]
это интерполяционный многочлен
- (Правильный ответ) в явном виде
- в форме Лагранжа
- в форме Ньютона
На заданном отрезке [a,b] имеется только один корень, если
- (Правильный ответ) знак производной не меняется
- знак функции не меняется, но меняется знак производной
- знак функции не меняется
К чему преобразуется исходная система n-го порядка в результате выполнения первого шага прямого хода метода Гаусса?
- к совокупности уравнения
- (Правильный ответ) к совокупности уравнения и системы линейных уравнений, порядок которой равен n-1
- к системе линейных уравнений, порядок которой равен n-1
К какому способу формирования последовательности нормально распределенных случайных величин относится метод, основанный на центральной предельной теореме?
- отсеивание псевдослучайных чисел из первоначальной последовательности
- (Правильный ответ) моделирование условий, соответствующих центральной предельной теореме теории вероятности
- прямое преобразование псевдослучайного числа
- обратное преобразование псевдослучайного числа
Как добиться того чтобы результаты по методу Эйлера, модифицированному методу Эйлера и методу Рунге-Кутта 4-го порядка были почти одинаковыми
- (Правильный ответ) уменьшая шаг интегрирования
- увеличивая шаг интегрирования
- удваивая шаг интегрирования
Какой фактор определяет использование статистической имитационной модели?
- скорость процесса
- (Правильный ответ) случайные воздействия
- высокая требуемая точность
- количество имитируемых элементов
Интерполяция — это
- (Правильный ответ) нахождение значения таблично заданной функции внутри заданного интервала
- восстановление функции в точках за пределами заданного интервала табличной функции
- усреднение или сглаживание табличной функции
Какая величина называется непрерывной?
- случайную величину, которая может принимать только одно значение из некоторого конечного или бесконечного промежутка
- случайная величина, которая может принимать только одно значение из некоторого конечного и все значения бесконечного промежутка
- (Правильный ответ) случайную величину, которая может принимать все значения из некоторого конечного или бесконечного промежутка
Как звучит постановка в численных методах задача Коши для системы y(x) с учетом двух начальных условия: y(x0)=y0, y1(x0)=(y1)0?
- (Правильный ответ) найти табличные функции y(x) и (y1)(x),
- нет правильного ответа
- найти табличные функции y(x) и (y1)(x),
Каким количеством нелинейных уравнений описывается модель, если законы функционирования модели нелинейны, а моделируемые процесс или система обладают одной степенью свободы?
- тремя нелинейными уравнениями
- двумя нелинейными уравнениями
- (Правильный ответ) одним нелинейным уравнением
К какому уравнению неприменимо отделение корней?
- (Правильный ответ) применимо к обоим
- трансцендентному
- алгебраическому
Можно ли методом серединного квадрата генерировать натуральные числа?
- нет, в любом случае
- (Правильный ответ) да, в любом случае
- да, если правильно подобрать первое число
Пересечение касательной к функции и осью абсцисс дает точку, используемую в методе
- во всех указанных методах
- простых итераций
- половинного деления
- (Правильный ответ) Ньютона
В чем заключается сглаживание опытных данных методом наименьших квадратов?
- при сглаживании опытных данных аппроксимирующей кривую F(x) стремятся провести так, чтобы ее отклонения от табличных данных (уклонения) по всем узловым точкам были максимальными
- (Правильный ответ) при сглаживании опытных данных аппроксимирующей кривую F(x) стремятся провести так, чтобы ее отклонения от табличных данных (уклонения) по всем узловым точкам были минимальными
- при сглаживании опытных данных аппроксимирующей кривую F(x) стремятся провести так, чтобы ее отклонения от табличных данных (уклонения) по большинству узловых точек были максимальными
- при сглаживании опытных данных аппроксимирующей кривую F(x) стремятся провести так, чтобы ее отклонения от табличных данных (уклонения) по большинству узловых точек были минимальными
К каким методам относятся численные методы по характеру результата?
- нет правильного ответа
- (Правильный ответ) приближенным
- точным
Какое количество этапов в решении задачи моделирования случайных величин с нормальным законом распределения?
- 1
- 3
- (Правильный ответ) 2
- 4
Сколько этапов можно выделить для решения задачи генерирования случайных чисел на ЭВМ с заданным законом распределения?
- (Правильный ответ) 2
- 1
- 4
- 3
Дисперсия постоянной величины C равна
- CD(1)
- постоянной ненулевой величине
- (Правильный ответ) 0
- CD(0)
Как называются модели, в которых предполагается отсутствие всяких случайных воздействий и их элементы (элементы модели) достаточно точно установлены?
- статические
- (Правильный ответ) детерминированные
- дискретные
- динамические
Как еще называется метод Эйлера?
- метод Рунге–Кутта второго порядка
- (Правильный ответ) метод Рунге–Кутта первого порядка
- метод Рунге–Кутта четвертого порядка
Отец мальчика, возвращаясь домой, заметил большое количество магазинов с колбасой и решил купить для сына килограмм, он заходил в каждый магазин и записывал цены в таблицу, однако возвращаться в магазин, где он уже был он не хочет, поэтому он решил определить вероятность того, дороже или дешевле будет колбаса в следующем магазине. Какую математическую модель взять отцу за основу?
- (Правильный ответ) СДА
- СНА
- ДДА
- СНИ
- ДНА
В каком случае уравнение f(x)=0 называется трансцендентным уравнением?
- если функция f(x) имеет вид многочлена степени m,
- (Правильный ответ) если функция f(x) включает в себя тригонометрические функции от некоторого аргумента x
- (Правильный ответ) если функция f(x) включает в себя экспоненциальные функции от некоторого аргумента x
Какие математические модели применяются при имитационном моделировании?
- с помощью которых нельзя заранее вычислить или предсказать поведение системы, а для предсказания поведения системы необходим вычислительный эксперимент (имитация) на математической модели для всех возможных исходных данных
- (Правильный ответ) с помощью которых нельзя заранее вычислить или предсказать поведение системы, а для предсказания поведения системы необходим вычислительный эксперимент (имитация) на математической модели при заданных исходных данных
- с помощью которых можно заранее вычислить или предсказать поведение системы, и для предсказания поведения системы нет необходимости в применении вычислительного эксперимента (имитации) на математической модели при заданных исходных данных
Математическое ожидание есть
- (Правильный ответ) неслучайная величина для дискретной и непрерывной величины
- неслучайная величина для дискретной величины
- случайная величина для дискретной и непрерывной величины
- случайная величина для дискретной величины
- неслучайная величина для непрерывной величины
- случайная величина для непрерывной величины
Метод «золотого сечения» является методом
- градиентным методом
- (Правильный ответ) прямого поиска
- градиентным методом второго порядка
К какой форме представления (задания) закона распределения относится биномиальное распределение, определяемое законом Бернулли Pn(k)=Cnkpkqn-k (где k = 0, 1, 2, …, n – количество возможных появлений событий, а q = 1-p – вероятность не появления событий)?
- табличное задание
- графическое задание
- (Правильный ответ) аналитическое задание
В простейшем случае при расчете определенного интеграла функции его представляют в виде:
- (Правильный ответ) суммы значений функции
- произведения значений функции
- разность значений функции
Для какого из методов больше подойдет характеристика: численный метод, моделирующий на ЭВМ псевдослучайные числовые последовательности с заданными вероятностными характеристиками
- метод Ньютона
- метод секущих
- метод хорд
- линейный конгруэнтный метод
- (Правильный ответ) метод Монте-Карло
В чем заключается построение математической модели?
- в определении связей между теми или иными процессами и явлениями, создании математического аппарата, позволяющего выразить количественно связь между теми или иными процессами и явлениями, между интересующими специалиста физическими величинами, и факторами, влияющими на конечный результат
- (Правильный ответ) в определении связей между теми или иными процессами и явлениями, создании математического аппарата, позволяющего выразить количественно и качественно связь между теми или иными процессами и явлениями, между интересующими специалиста физическими величинами, и факторами, влияющими на конечный результат
- в определении связей между теми или иными процессами и явлениями, создании математического аппарата, позволяющего выразить количественно связь между теми или иными процессами и явлениями, между интересующими специалиста математическими величинами, и факторами, влияющими на конечный результат
- в определении связей между теми или иными процессами и явлениями, создании математического аппарата, позволяющего выразить количественно и качественно связь между теми или иными процессами и явлениями, между интересующими специалиста математическими величинами, и факторами, влияющими на конечный результат
Какое условие необходимо соблюдать на каждом шаге интегрирования при применении для решения системы дифференциальных уравнений тех же методов, что и для решения одного дифференциального уравнения первого порядка?
- все уравнения системы необходимо решать последовательно
- (Правильный ответ) все уравнения системы необходимо решать параллельно
- нет правильного ответа
Какая задача не поддается точному решению на ЭВМ в виде формул?
- (Правильный ответ) все указанные поддаются
- дифференциально-интегральная система уравнений
- интегральное уравнение 1-го порядка
- дифференциальная система уравнений
- система нелинейных уравнений
К каким случайным величинам применим способ описания распределения случайной величины в виде таблицы, в виде формулы или графически?
- только к непрерывным
- (Правильный ответ) только к дискретным
- к любым
При каком условии прекращается процесс поиска корня по методу простых итераций?
- (Правильный ответ)
В задаче о камне, брошенном под углом к горизонту, решенной в явном виде, как зависимость координаты от времени, была применена модель
- ДДА
- СДИ
- СДА
- (Правильный ответ) ДНА
- СНИ
Как определить значение нормально распределенной случайной величины с требуемым математическим ожиданием и требуемым среднеквадратичным отклонением для двенадцати (k=12) равномерно распределенных случайных величин?
- (Правильный ответ)
Какой модели быть не может?
- вещественной, математической
- вещественной, физической
- (Правильный ответ) идеальной, физической
- идеальной, математической
Какой метод называется градиентным?
- (Правильный ответ) метод, в котором для нахождения корня используется значение производной
- метод, в котором для нахождения корня используется нахождение значения функции в различных точках интервала изоляции
- метод, в котором для нахождения корня используется нахождение значения функции на границах интервала изоляции
Укажите какого порядка будет максимальная ошибка метода Симпсона
- 1
- 4
- (Правильный ответ) 3
- 2
Какой из методов не содержит рекуррентной формулы?
- серединного квадрата
- квадратичный конгруэнтный
- (Правильный ответ) все указанные содержат
- линейно конгруэнтный
Что необходимо сделать для построения интерполяционного многочлена в явном виде?
- (Правильный ответ) получить систему уравнений:
- нет правильного ответа
- получить уравнение: a0x1n+ a1x1n-1+…+ an-1×1+an=yi, i= n
Укажите метод, неприменяемый для компьютерного моделирования:
- (Правильный ответ) экспериментальный анализ
- точное решение в виде формул
- численное решение
Метод половинного деления применим для случая
- алгебраического уравнения
- трансцендентного уравнения
- (Правильный ответ) применимо к обоим
Разделенные разности используются интерполяционным многочленом в формах
- (Правильный ответ) Ньютона
- Лагранжа
- в явном виде
В чем состоит суть «метода середины квадрата»?
- (Правильный ответ) в том, что предыдущее случайное число возводится в квадрат, а затем из результата извлекаются средние цифры
- в выборе четырех «магических чисел»: x0— начальное значение, ; — множитель, ; c— приращение, ; m— модуль,
Главная /
Введение в математическое моделирование /
Укажите какого порядка будет максимальная ошибка метода Симпсона
Укажите какого порядка будет максимальная ошибка метода Симпсона
вопрос
Правильный ответ:
1
2
3
4
Сложность вопроса
84
Сложность курса: Введение в математическое моделирование
75
Оценить вопрос
Очень сложно
Сложно
Средне
Легко
Очень легко
Спасибо за оценку!
Комментарии:
Аноним
Я завалил сессию, почему я не увидел данный сайт с ответами интуит до этого
14 окт 2015
Оставить комментарий
Другие ответы на вопросы из темы алгоритмы и дискретные структуры интуит.
-
#
Какой из методов обладает большей точностью при решении системы линейных уравнений в общем случае?
-
#
Разделенные разности используются интерполяционным многочленом в формах
-
#
В чем состоит суть компьютерного моделирования?
-
#
Что требуется для нахождения объективных и устойчивых характеристик процесса при статистическом моделировании?
-
#
К каким случайным величинам применим способ описания распределения случайной величины в виде таблицы, в виде формулы или графически?
В
основе метода Симпсона лежит следующая
лемма.
Лемма.
Если
 или
или ,
,
то
 .
.
(4.5)
Выполним
доказательство лишь для квадратичной
параболы. Подставим функцию
 под интеграл в (4.5) и вычислим его. Получим
под интеграл в (4.5) и вычислим его. Получим



 .
.
(4.6)
С
другой стороны,
 ,
,
 ,
,
 .
.
Сложив
три последних выражения, мы получим
выражение (4.6), что и доказывает лемму.
Перейдем
к изложению метода Симпсона. Разделим
точки
 ,
,
разбивающие отрезок интегрирования на частичные отрезки с равномерным
на частичные отрезки с равномерным
шагом ,
,
на тройки точек ,
, ,…,
,…, .
.
Для такого разбиения число отрезков необходимо выбрать четным. На отрезке,
необходимо выбрать четным. На отрезке,
определяемом -й
-й
тройкой точек ,
, ,
,
заменим подынтегральную функцию
параболой второго порядка ,
,
проходящей через точки ,
, ,
, ,
,
и заменим точное значение интеграла на
этом отрезке интегралом от полученной параболы. На основании
от полученной параболы. На основании
леммы можно записать, что
 .
.
Приближенное
значение интеграла на всем отрезке
интегрирования
 получим как сумму этих частичных
получим как сумму этих частичных
интегралов:

 .
.
(4.7)
Мы
видим, что в методе Симпсона крайние
значения функции
 суммируются с весом 1, значения
суммируются с весом 1, значения с нечетным номером
с нечетным номером – с весом
– с весом и значения
и значения с четным номером
с четным номером – с весом
– с весом .
.
Суммы значений функции с различными
весами удобно вычислить отдельно, а
затем их сложить, умножить на шаг и разделить на 3.
и разделить на 3.
4.7 Погрешность метода Симпсона
Абсолютная
погрешность формулы Симпсона (4.7)
определяется выражением
 .
.
Она
складывается из частичных погрешностей
 ,
,
полученных на каждой тройке точек,
используемых для аппроксимации:
 .
.
Частичная
погрешность здесь определяется выражением
 .
.
Оценка
общей погрешности имеет вид
 .
.
(4.8)
Получим
оценки сначала для частичной, а затем
и для полной погрешностей. Для этого
рассмотрим вспомогательную функцию
 ,
,
 .
.
При
 и
и эта функция совпадает с
эта функция совпадает с .
.
Кроме того, .
.
Найдем производные функции до 3-го порядка включительно. Поскольку
до 3-го порядка включительно. Поскольку
 ,
,
то,
используя правила дифференцирования
интеграла по нижнему и верхнему пределам,
получим
 ,
,
а
также


 ,
,
 .
.
Выполняя
последовательное дифференцирование,
будем иметь


 ,
,
 ,
,


 ,
,
 .
.
Применяя
к
 теорему Лагранжа, т.е. используя равенство
теорему Лагранжа, т.е. используя равенство
 ,
,
 ,
,
получим
 .
.
Обозначая
 максимальное по модулю значение четвертой
максимальное по модулю значение четвертой
производной подынтегральной функции на отрезке интегрирования
на отрезке интегрирования ,
,
 ,
,
получим
оценку для 3-й производной функции
 :
:
 .
.
Поскольку
 ,
,
то
 .
.
Аналогично
получаем
 ,
,
 ,
,
 ,
,
 .
.
Поскольку
 ,
,
то для частичной погрешности получаем оценку
получаем оценку
 .
.
Выражение
(4.8) имеет
 слагаемых, следовательно, абсолютная
слагаемых, следовательно, абсолютная
погрешность формулы Симпсона будет
оцениваться выражением
 .
.
Из
последней формулы видно, что абсолютная
погрешность метода Симпсона имеет тот
же порядок, что и
 .
.
Формула Симпсона точна для полиномов
третьей степени, поскольку для полинома
3-й степени .
.
Это является следствием того, что лемма
(4.5) справедлива также для полинома 3-й
степени.
4.8 Интерполяционные квадратурные формулы
Рассмотрим
вычисление следующего интеграла:
 ,
,
(4.9)
где
 – некоторая достаточно гладкая функция,
– некоторая достаточно гладкая функция,
которую назовем подынтегральной, – некоторая неотрицательная интегрируемая
– некоторая неотрицательная интегрируемая
функция, которая называется весовой.
Этот
интеграл является более общим по
сравнению с рассматриваемым ранее
интегралом (4.1). Интеграл вида (4.1) получим
из (4.9) при весовой функции
 .
.
Для
вычисления интеграла (4.9) применим
следующий подход: выберем на отрезке

 точек
точек![]() .
.
В отличие от предыдущих методов, не
будем вычислять интегралы на частичных
отрезках, а заменим подынтегральную
функцию на всем отрезке интерполяционным полиномом (3.7),
интерполяционным полиномом (3.7),
построенным
по узлам
 .
.
В результате получим следующую
квадратурную формулу:
 ,
,
(4.10)
где
 ,
,
(4.11)
 ,
,
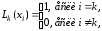
и
 – полином влияния
– полином влияния -го
-го
узла (3.6).
Формула
(4.10), в которой коэффициенты определяются
по выражению (4.11),
называется интерполяционной
квадратурной формулой.
Рассмотрим
вопрос погрешности интерполяционной
квадратурной формулы. Заменяя
подынтегральную функцию
![]() полиномом Лагранжа
полиномом Лагранжа ,
,
получаем абсолютную грешность![]() (3.27). Представим функцию
(3.27). Представим функцию![]() виде
виде

и
найдем интеграл (4.9)

 .
.
Ясно,
что второе слагаемое правой части этого
выражения есть абсолютная погрешность
интерполяционной квадратурной формулы:
 .
.
Подставляя
сюда выражение (3.27) для погрешности
 ,
,
получим следующую формулу абсолютной
погрешности интерполяционной квадратурной
формулы (4.10):
 .
.
Если
обозначить
![]() ,
,
то
для оценки абсолютной погрешности
интерполяционной квадратурной формулы
(4.10) получим выражение
 .
.
Из
полученных выражений для погрешности
видно, что интерполяционная квадратурная
формула (4.10) точна для полиномов
![]() -й
-й
степени, поскольку в этом случае .
.
О такой квадратурной формуле говорят,
что ее степень точности равна .
.
Таким
образом, квадратурная формула
интерполяционного типа (4.10), построенная
по
 узлам
узлам ,
,
является точной для полиномов![]() -й
-й
степени. Справедливо также и обратное
утверждение, которое сформулируем в
виде теоремы.
Теорема.
Если квадратурная формула
 (4.12)
(4.12)
точна
для полинома степени
![]() ,
,
то она является интерполяционной.
Для
доказательства достаточно показать,
что если
 – полином степени
– полином степени![]() ,
,
то коэффициенты определяются формулой (4.11), т.е.
определяются формулой (4.11), т.е. .
.
Выберем в качестве такого полинома
полином влияния -го
-го
узла (3.6). Тогда по условию теоремы квадратурная
(3.6). Тогда по условию теоремы квадратурная
формула (4.12) для него будет точной, т.е.
 ,
,
 .
.
Полином
влияния обладает свойством
в
связи с чем предыдущий интеграл будет
равен
 .
.
Левая
часть последнего равенства есть
 ,
,
т.е. ,
, ,
,
и теорема доказана.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
В каком случае квадратурная формула называется формулой Симпсона, а метод – методом Симпсона?

Чему равна ошибка на каждом шаге интегрирования дифференциальных уравнений в методе Рунге-Кутта 4-го порядка?
Точность h метода Рунге-Кутта 4-го порядка
К чему преобразуется исходная система n-го порядка в результате выполнения первого шага прямого хода метода Гаусса?
В основе какого метода лежит идея последовательного исключения неизвестных?
Формула какого рода используется на обратном шаге метода Гаусса при нахождении корней?
При выполнении какого условия прекращается итерационный процесс поиска в рамках метода простых итераций?
Какой из параметров не влияет на ошибку методов Симпсона, трапеций и прямоугольников?
Чем аппроксимируется подынтегральная функция в каждой части деления в методе Симпсона?
В каком случае будет формально непригоден простейший вариант метода Гаусса, называемый схемой единственного деления?
From Wikipedia, the free encyclopedia
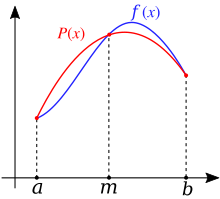
Simpson’s rule can be derived by approximating the integrand f (x) (in blue) by the quadratic interpolant P(x) (in red).

An animation showing how Simpson’s rule approximates the function with a parabola and the reduction in error with decreased step size

An animation showing how Simpson’s rule approximation improves with more strips.
In numerical integration, Simpson’s rules are several approximations for definite integrals, named after Thomas Simpson (1710–1761).
The most basic of these rules, called Simpson’s 1/3 rule, or just Simpson’s rule, reads
![{displaystyle int _{a}^{b}f(x),dxapprox {frac {b-a}{6}}left[f(a)+4fleft({frac {a+b}{2}}right)+f(b)right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c803efa545e470e97be928947d5d97c06e46553a)
In German and some other languages, it is named after Johannes Kepler, who derived it in 1615 after seeing it used for wine barrels (barrel rule, Keplersche Fassregel). The approximate equality in the rule becomes exact if f is a polynomial up to and including 3rd degree.
If the 1/3 rule is applied to n equal subdivisions of the integration range [a, b], one obtains the composite Simpson’s 1/3 rule. Points inside the integration range are given alternating weights 4/3 and 2/3.
Simpson’s 3/8 rule, also called Simpson’s second rule, requires one more function evaluation inside the integration range and gives lower error bounds, but does not improve on order of the error.
If the 3/8 rule is applied to n equal subdivisions of the integration range [a, b], one obtains the composite Simpson’s 3/8 rule.
Simpson’s 1/3 and 3/8 rules are two special cases of closed Newton–Cotes formulas.
In naval architecture and ship stability estimation, there also exists Simpson’s third rule, which has no special importance in general numerical analysis, see Simpson’s rules (ship stability).
Simpson’s 1/3 rule[edit]
Simpson’s 1/3 rule, also simply called Simpson’s rule, is a method for numerical integration proposed by Thomas Simpson. It is based upon a quadratic interpolation. Simpson’s 1/3 rule is as follows:
![{displaystyle {begin{aligned}int _{a}^{b}f(x),dx&approx {frac {1}{3}}hleft[f(a)+4fleft({frac {a+b}{2}}right)+f(b)right]\&={frac {b-a}{6}}left[f(a)+4fleft({frac {a+b}{2}}right)+f(b)right],end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ef0292642a106bc7f43fa74d032784d3918b2841)
where 
The error in approximating an integral by Simpson’s rule for 

where 


The error is asymptotically proportional to 

![{displaystyle [a, b]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5be2db1121262d7d81c3fefaef1a359117682bc3)
Since the error term is proportional to the fourth derivative of 
If the second derivative 

![{displaystyle (b-a)fleft({frac {a+b}{2}}right)+{frac {1}{3}}left({frac {b-a}{2}}right)^{3}f''left({frac {a+b}{2}}right)leq int _{a}^{b}f(x),dxleq {frac {b-a}{6}}left[f(a)+4fleft({frac {a+b}{2}}right)+f(b)right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/91725663a55a783c1148b1834406fccdffc5b625)
Derivations[edit]
Quadratic interpolation[edit]
One derivation replaces the integrand 



Using integration by substitution, one can show that[3][2]
![{displaystyle int _{a}^{b}P(x),dx={frac {b-a}{6}}left[f(a)+4fleft({frac {a+b}{2}}right)+f(b)right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c8efd858606185eacc98393da3c1ce9639f80f6d)
Introducing the step size
![{displaystyle int _{a}^{b}P(x),dx={frac {1}{3}}hleft[f(a)+4fleft({frac {a+b}{2}}right)+f(b)right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b2f0570c8b186566114b27d471ae177bd10ca9b8)
Because of the 
Averaging the midpoint and the trapezoidal rules[edit]
Another derivation constructs Simpson’s rule from two simpler approximations: the midpoint rule

and the trapezoidal rule

The errors in these approximations are

and

respectively, where 
This weighted average is exactly Simpson’s rule.

Using another approximation (for example, the trapezoidal rule with twice as many points), it is possible to take a suitable weighted average and eliminate another error term. This is Romberg’s method.
Undetermined coefficients[edit]
The third derivation starts from the ansatz

The coefficients α, β and γ can be fixed by requiring that this approximation be exact for all quadratic polynomials. This yields Simpson’s rule. (This derivation is essentially a less rigorous version of the quadratic interpolation derivation, where one saves significant calculation effort by guessing the correct functional form.)
Composite Simpson’s 1/3 rule[edit]
If the interval of integration ![[a,b]](https://wikimedia.org/api/rest_v1/media/math/render/svg/9c4b788fc5c637e26ee98b45f89a5c08c85f7935)
However, it is often the case that the function we are trying to integrate is not smooth over the interval. Typically, this means that either the function is highly oscillatory or lacks derivatives at certain points. In these cases, Simpson’s rule may give very poor results. One common way of handling this problem is by breaking up the interval 
Suppose that the interval 
Dividing the interval 




![{displaystyle {begin{aligned}int _{a}^{b}f(x),dx&approx {frac {1}{3}}hsum _{i=1}^{n/2}{big [}f(x_{2i-2})+4f(x_{2i-1})+f(x_{2i}){big ]}\&={frac {1}{3}}h{big [}f(x_{0})+4f(x_{1})+2f(x_{2})+4f(x_{3})+2f(x_{4})+dots +2f(x_{n-2})+4f(x_{n-1})+f(x_{n}){big ]}\&={frac {1}{3}}hleft[f(x_{0})+4sum _{i=1}^{n/2}f(x_{2i-1})+2sum _{i=1}^{n/2-1}f(x_{2i})+f(x_{n})right].end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/eee2a4e1b0368b62ee0e4479d3b9f93182d79608)
This composite rule with
The error committed by the composite Simpson’s rule is

where
![{displaystyle {frac {1}{180}}h^{4}(b-a)max _{xi in [a,b]}left|f^{(4)}(xi )right|.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ea1d008540386824911b771355f73ac6b80cb410)
This formulation splits the interval
Simpson’s 3/8 rule[edit]
Simpson’s 3/8 rule, also called Simpson’s second rule, is another method for numerical integration proposed by Thomas Simpson. It is based upon a cubic interpolation rather than a quadratic interpolation. Simpson’s 3/8 rule is as follows:
![{displaystyle {begin{aligned}int _{a}^{b}f(x),dx&approx {frac {3}{8}}hleft[f(a)+3fleft({frac {2a+b}{3}}right)+3fleft({frac {a+2b}{3}}right)+f(b)right]\&={frac {b-a}{8}}left[f(a)+3fleft({frac {2a+b}{3}}right)+3fleft({frac {a+2b}{3}}right)+f(b)right],end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ffa53cb98da06030535f2058c541c7c88ca354c0)
where 
The error of this method is

where
A further generalization of this concept for interpolation with arbitrary-degree polynomials are the Newton–Cotes formulas.
Composite Simpson’s 3/8 rule[edit]
Dividing the interval
![{displaystyle {begin{aligned}int _{a}^{b}f(x),dx&approx {frac {3}{8}}hsum _{i=1}^{n/3}{big [}f(x_{3i-3})+3f(x_{3i-2})+3f(x_{3i-1})+f(x_{3i}){big ]}\&={frac {3}{8}}h{big [}f(x_{0})+3f(x_{1})+3f(x_{2})+2f(x_{3})+3f(x_{4})+3f(x_{5})+2f(x_{6})+dots +2f(x_{n-3})+3f(x_{n-2})+3f(x_{n-1})+f(x_{n}){big ]}\&={frac {3}{8}}hleft[f(x_{0})+3sum _{i=1, 3nmid i}^{n-1}f(x_{i})+2sum _{i=1}^{n/3-1}f(x_{3i})+f(x_{n})right].end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c80da564e96ff6e8f16b3eb69a1ad459214b25f5)
While the remainder for the rule is shown as[6]
we can only use this if

Alternative extended Simpson’s rule[edit]
This is another formulation of a composite Simpson’s rule: instead of applying Simpson’s rule to disjoint segments of the integral to be approximated, Simpson’s rule is applied to overlapping segments, yielding[7]
![{displaystyle int _{a}^{b}f(x),dxapprox {frac {1}{48}}hleft[17f(x_{0})+59f(x_{1})+43f(x_{2})+49f(x_{3})+48sum _{i=4}^{n-4}f(x_{i})+49f(x_{n-3})+43f(x_{n-2})+59f(x_{n-1})+17f(x_{n})right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8cb6a6ffd9d532a9be7225ff8199ad55dfcda3a6)
The formula above is obtained by combining the composite Simpson’s 1/3 rule with the one consisting of using Simpson’s 3/8 rule in the extreme subintervals and Simpson’s 1/3 rule in the remaining subintervals. The result is then obtained by taking the mean of the two formulas.
Simpson’s rules in the case of narrow peaks[edit]
In the task of estimation of full area of narrow peak-like functions, Simpson’s rules are much less efficient than trapezoidal rule. Namely, composite Simpson’s 1/3 rule requires 1.8 times more points to achieve the same accuracy as trapezoidal rule.[8] Composite Simpson’s 3/8 rule is even less accurate. Integration by Simpson’s 1/3 rule can be represented as a weighted average with 2/3 of the value coming from integration by the trapezoidal rule with step h and 1/3 of the value coming from integration by the rectangle rule with step 2h. The accuracy is governed by the second (2h step) term. Averaging of Simpson’s 1/3 rule composite sums with properly shifted frames produces the following rules:
![{displaystyle int _{a}^{b}f(x),dxapprox {frac {1}{24}}hleft[-f(x_{-1})+12f(x_{0})+25f(x_{1})+24sum _{i=2}^{n-2}f(x_{i})+25f(x_{n-1})+12f(x_{n})-f(x_{n+1})right],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a2297e8d9590c12f404dfe1d72773109f5ba9108)
where two points outside of the integrated region are exploited, and
![{displaystyle int _{a}^{b}f(x),dxapprox {frac {1}{24}}hleft[9f(x_{0})+28f(x_{1})+23f(x_{2})+24sum _{i=3}^{n-3}f(x_{i})+23f(x_{n-2})+28f(x_{n-1})+9f(x_{n})right],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4ac2ec11b67e0314baea2e15d5190a40a030e795)
where only points within integration region are used. Application of the second rule to the region of 3 points generates 1/3 Simpon’s rule, 4 points — 3/8 rule.
These rules are very much similar to the alternative extended Simpson’s rule. The coefficients within the major part of the region being integrated are one with non-unit coefficients only at the edges. These two rules can be associated with Euler–MacLaurin formula with the first derivative term and named First order Euler–MacLaurin integration rules.[8] The two rules presented above differ only in the way how the first derivative at the region end is calculated. The first derivative term in the Euler–MacLaurin integration rules accounts for integral of the second derivative, which equals the difference of the first derivatives at the edges of the integration region. It is possible to generate higher order Euler–Maclaurin rules by adding a difference of 3rd, 5th, and so on derivatives with coefficients, as defined by Euler–MacLaurin formula.
Composite Simpson’s rule for irregularly spaced data[edit]
For some applications, the integration interval ![{displaystyle I=[a,b]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6d6214bb3ce7f00e496c0706edd1464ac60b73b5)



![{displaystyle int _{a}^{b}f(x),dx=sum _{i=0}^{N/2-1}{frac {h_{2i}+h_{2i+1}}{6}}left[left(2-{frac {h_{2i+1}}{h_{2i}}}right)f_{2i}+{frac {(h_{2i}+h_{2i+1})^{2}}{h_{2i}h_{2i+1}}}f_{2i+1}+left(2-{frac {h_{2i}}{h_{2i+1}}}right)f_{2i+2}right],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/179b0fb46d573c9166d55ac7e8fc65d44b44df4e)
where

are the function values at the 
In case of odd number
and the last interval is handled separately by adding the following to the result:[10]

where
![{displaystyle {begin{aligned}alpha &={frac {2h_{N-1}^{2}+3h_{N-1}h_{N-2}}{6(h_{N-2}+h_{N-1})}},\[1ex]beta &={frac {h_{N-1}^{2}+3h_{N-1}h_{N-2}}{6h_{N-2}}},\[1ex]eta &={frac {h_{N-1}^{3}}{6h_{N-2}(h_{N-2}+h_{N-1})}}.end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7f72e82675db6abb8f3db9b95423c2ba36cdef9a)
| Example implementation in Python |
from collections.abc import Sequence def simpson_nonuniform(x: Sequence[float], f: Sequence[float]) -> float: """ Simpson rule for irregularly spaced data. :param x: Sampling points for the function values :param f: Function values at the sampling points :return: approximation for the integral See ``scipy.integrate.simpson`` and the underlying ``_basic_simpson`` for a more performant implementation utilizing numpy's broadcast. """ N = len(x) - 1 h = [x[i + 1] - x[i] for i in range(0, N)] assert N > 0 result = 0.0 for i in range(1, N, 2): h0, h1 = h[i - 1], h[i] hph, hdh, hmh = h1 + h0, h1 / h0, h1 * h0 result += (hph / 6) * ( (2 - hdh) * f[i - 1] + (hph**2 / hmh) * f[i] + (2 - 1 / hdh) * f[i + 1] ) if N % 2 == 1: h0, h1 = h[N - 2], h[N - 1] result += f[N] * (2 * h1 ** 2 + 3 * h0 * h1) / (6 * (h0 + h1)) result += f[N - 1] * (h1 ** 2 + 3 * h1 * h0) / (6 * h0) result -= f[N - 2] * h1 ** 3 / (6 * h0 * (h0 + h1)) return result |
| Example implementation in R |
SimpsonInt <- function(fx, dx) { n <- length(dx) h <- diff(dx) stopifnot(exprs = { length(fx) == n all(h >= 0) }) res <- 0 for (i in seq(1L, n - 2L, 2L)) { hph <- h[i] + h[i + 1L] hdh <- h[i + 1L] / h[i] res <- res + hph / 6 * ((2 - hdh) * fx[i] + hph ^ 2 / (h[i] * h[i + 1L]) * fx[i + 1L] + (2 - 1 / hdh) * fx[i + 2L]) } if (n %% 2 == 0) { hph <- h[n - 1L] + h[n - 2L] threehth <- 3 * h[n - 1L] * h[n - 2L] sixh2 <- 6 * h[n - 2L] h1sq <- h[n - 1L] ^ 2 res <- res + (2 * h1sq + threehth) / (6 * hph) * fx[n] + (h1sq + threehth) / sixh2 * fx[n - 1L] - (h1sq * h[n - 1L]) / (sixh2 * hph) * fx[n - 2L] } res } |
See also[edit]
- Newton–Cotes formulas
- Gaussian quadrature
Notes[edit]
- ^ Atkinson 1989, equation (5.1.15).
- ^ a b Süli & Mayers 2003, §7.2.
- ^ Atkinson 1989, p. 256.
- ^ Atkinson 1989, pp. 257–258.
- ^ Süli & Mayers 2003, §7.5.
- ^ a b Matthews 2004.
- ^ Weisstein, Equation 35.
- ^ a b Kalambet, Kozmin & Samokhin 2018.
- ^ Shklov 1960.
- ^ Cartwright 2017, Equation 8. The equation in Cartwright is calculating the first interval whereas the equations in the Wikipedia article are adjusting for the last integral. If the proper algebraic substitutions are made, the equation results in the values shown..
References[edit]
- Atkinson, Kendall E. (1989). An Introduction to Numerical Analysis (2nd ed.). John Wiley & Sons. ISBN 0-471-50023-2.
- Burden, Richard L.; Faires, J. Douglas (2000). Numerical Analysis (7th ed.). Brooks/Cole. ISBN 0-534-38216-9.
- Cartwright, Kenneth V. (September 2017). «Simpson’s Rule Cumulative Integration with MS Excel and Irregularly-spaced Data» (PDF). Journal of Mathematical Sciences and Mathematics Education. 12 (2): 1–9. Retrieved 18 December 2022.
- Kalambet, Yuri; Kozmin, Yuri; Samokhin, Andrey (2018). «Comparison of integration rules in the case of very narrow chromatographic peaks». Chemometrics and Intelligent Laboratory Systems. 179: 22–30. doi:10.1016/j.chemolab.2018.06.001. ISSN 0169-7439.
- Matthews, John H. (2004). «Simpson’s 3/8 Rule for Numerical Integration». Numerical Analysis — Numerical Methods Project. California State University, Fullerton. Archived from the original on 4 December 2008. Retrieved 11 November 2008.
- Shklov, N. (December 1960). «Simpson’s Rule for Unequally Spaced Ordinates». The American Mathematical Monthly. 67 (10): 1022–1023. doi:10.2307/2309244. JSTOR 2309244.
- Süli, Endre; Mayers, David (2003). An Introduction to Numerical Analysis. Cambridge University Press. ISBN 0-521-00794-1.
- Weisstein, Eric W. «Newton-Cotes Formulas». MathWorld. Retrieved 14 December 2022.
External links[edit]
- «Simpson formula», Encyclopedia of Mathematics, EMS Press, 2001 [1994]
- Weisstein, Eric W. «Simpson’s Rule». MathWorld.
- Simpson’s 1/3rd rule of integration — Notes, PPT, Mathcad, Matlab, Mathematica, Maple at Numerical Methods for STEM undergraduate
- A detailed description of a computer implementation is described by Dorai Sitaram in Teach Yourself Scheme in Fixnum Days, Appendix C
This article incorporates material from Code for Simpson’s rule on PlanetMath, which is licensed under the Creative Commons Attribution/Share-Alike License.
From Wikipedia, the free encyclopedia
Simpson’s rule can be derived by approximating the integrand f (x) (in blue) by the quadratic interpolant P(x) (in red).
An animation showing how Simpson’s rule approximates the function with a parabola and the reduction in error with decreased step size
An animation showing how Simpson’s rule approximation improves with more strips.
In numerical integration, Simpson’s rules are several approximations for definite integrals, named after Thomas Simpson (1710–1761).
The most basic of these rules, called Simpson’s 1/3 rule, or just Simpson’s rule, reads
In German and some other languages, it is named after Johannes Kepler, who derived it in 1615 after seeing it used for wine barrels (barrel rule, Keplersche Fassregel). The approximate equality in the rule becomes exact if f is a polynomial up to and including 3rd degree.
If the 1/3 rule is applied to n equal subdivisions of the integration range [a, b], one obtains the composite Simpson’s 1/3 rule. Points inside the integration range are given alternating weights 4/3 and 2/3.
Simpson’s 3/8 rule, also called Simpson’s second rule, requires one more function evaluation inside the integration range and gives lower error bounds, but does not improve on order of the error.
If the 3/8 rule is applied to n equal subdivisions of the integration range [a, b], one obtains the composite Simpson’s 3/8 rule.
Simpson’s 1/3 and 3/8 rules are two special cases of closed Newton–Cotes formulas.
In naval architecture and ship stability estimation, there also exists Simpson’s third rule, which has no special importance in general numerical analysis, see Simpson’s rules (ship stability).
Simpson’s 1/3 rule[edit]
Simpson’s 1/3 rule, also simply called Simpson’s rule, is a method for numerical integration proposed by Thomas Simpson. It is based upon a quadratic interpolation. Simpson’s 1/3 rule is as follows:
where
The error in approximating an integral by Simpson’s rule for
where
The error is asymptotically proportional to
Since the error term is proportional to the fourth derivative of
If the second derivative
Derivations[edit]
Quadratic interpolation[edit]
One derivation replaces the integrand
Using integration by substitution, one can show that[3][2]
Introducing the step size
Because of the
Averaging the midpoint and the trapezoidal rules[edit]
Another derivation constructs Simpson’s rule from two simpler approximations: the midpoint rule
and the trapezoidal rule
The errors in these approximations are
and
respectively, where
This weighted average is exactly Simpson’s rule.
Using another approximation (for example, the trapezoidal rule with twice as many points), it is possible to take a suitable weighted average and eliminate another error term. This is Romberg’s method.
Undetermined coefficients[edit]
The third derivation starts from the ansatz
The coefficients α, β and γ can be fixed by requiring that this approximation be exact for all quadratic polynomials. This yields Simpson’s rule. (This derivation is essentially a less rigorous version of the quadratic interpolation derivation, where one saves significant calculation effort by guessing the correct functional form.)
Composite Simpson’s 1/3 rule[edit]
If the interval of integration
However, it is often the case that the function we are trying to integrate is not smooth over the interval. Typically, this means that either the function is highly oscillatory or lacks derivatives at certain points. In these cases, Simpson’s rule may give very poor results. One common way of handling this problem is by breaking up the interval
Suppose that the interval
Dividing the interval
This composite rule with
The error committed by the composite Simpson’s rule is
where
This formulation splits the interval
Simpson’s 3/8 rule[edit]
Simpson’s 3/8 rule, also called Simpson’s second rule, is another method for numerical integration proposed by Thomas Simpson. It is based upon a cubic interpolation rather than a quadratic interpolation. Simpson’s 3/8 rule is as follows:
where
The error of this method is
where
A further generalization of this concept for interpolation with arbitrary-degree polynomials are the Newton–Cotes formulas.
Composite Simpson’s 3/8 rule[edit]
Dividing the interval
While the remainder for the rule is shown as[6]
we can only use this if
Alternative extended Simpson’s rule[edit]
This is another formulation of a composite Simpson’s rule: instead of applying Simpson’s rule to disjoint segments of the integral to be approximated, Simpson’s rule is applied to overlapping segments, yielding[7]
The formula above is obtained by combining the composite Simpson’s 1/3 rule with the one consisting of using Simpson’s 3/8 rule in the extreme subintervals and Simpson’s 1/3 rule in the remaining subintervals. The result is then obtained by taking the mean of the two formulas.
Simpson’s rules in the case of narrow peaks[edit]
In the task of estimation of full area of narrow peak-like functions, Simpson’s rules are much less efficient than trapezoidal rule. Namely, composite Simpson’s 1/3 rule requires 1.8 times more points to achieve the same accuracy as trapezoidal rule.[8] Composite Simpson’s 3/8 rule is even less accurate. Integration by Simpson’s 1/3 rule can be represented as a weighted average with 2/3 of the value coming from integration by the trapezoidal rule with step h and 1/3 of the value coming from integration by the rectangle rule with step 2h. The accuracy is governed by the second (2h step) term. Averaging of Simpson’s 1/3 rule composite sums with properly shifted frames produces the following rules:
where two points outside of the integrated region are exploited, and
where only points within integration region are used. Application of the second rule to the region of 3 points generates 1/3 Simpon’s rule, 4 points — 3/8 rule.
These rules are very much similar to the alternative extended Simpson’s rule. The coefficients within the major part of the region being integrated are one with non-unit coefficients only at the edges. These two rules can be associated with Euler–MacLaurin formula with the first derivative term and named First order Euler–MacLaurin integration rules.[8] The two rules presented above differ only in the way how the first derivative at the region end is calculated. The first derivative term in the Euler–MacLaurin integration rules accounts for integral of the second derivative, which equals the difference of the first derivatives at the edges of the integration region. It is possible to generate higher order Euler–Maclaurin rules by adding a difference of 3rd, 5th, and so on derivatives with coefficients, as defined by Euler–MacLaurin formula.
Composite Simpson’s rule for irregularly spaced data[edit]
For some applications, the integration interval
where
are the function values at the
In case of odd number
and the last interval is handled separately by adding the following to the result:[10]
where
| Example implementation in Python |
from collections.abc import Sequence def simpson_nonuniform(x: Sequence[float], f: Sequence[float]) -> float: """ Simpson rule for irregularly spaced data. :param x: Sampling points for the function values :param f: Function values at the sampling points :return: approximation for the integral See ``scipy.integrate.simpson`` and the underlying ``_basic_simpson`` for a more performant implementation utilizing numpy's broadcast. """ N = len(x) - 1 h = [x[i + 1] - x[i] for i in range(0, N)] assert N > 0 result = 0.0 for i in range(1, N, 2): h0, h1 = h[i - 1], h[i] hph, hdh, hmh = h1 + h0, h1 / h0, h1 * h0 result += (hph / 6) * ( (2 - hdh) * f[i - 1] + (hph**2 / hmh) * f[i] + (2 - 1 / hdh) * f[i + 1] ) if N % 2 == 1: h0, h1 = h[N - 2], h[N - 1] result += f[N] * (2 * h1 ** 2 + 3 * h0 * h1) / (6 * (h0 + h1)) result += f[N - 1] * (h1 ** 2 + 3 * h1 * h0) / (6 * h0) result -= f[N - 2] * h1 ** 3 / (6 * h0 * (h0 + h1)) return result |
| Example implementation in R |
SimpsonInt <- function(fx, dx) { n <- length(dx) h <- diff(dx) stopifnot(exprs = { length(fx) == n all(h >= 0) }) res <- 0 for (i in seq(1L, n - 2L, 2L)) { hph <- h[i] + h[i + 1L] hdh <- h[i + 1L] / h[i] res <- res + hph / 6 * ((2 - hdh) * fx[i] + hph ^ 2 / (h[i] * h[i + 1L]) * fx[i + 1L] + (2 - 1 / hdh) * fx[i + 2L]) } if (n %% 2 == 0) { hph <- h[n - 1L] + h[n - 2L] threehth <- 3 * h[n - 1L] * h[n - 2L] sixh2 <- 6 * h[n - 2L] h1sq <- h[n - 1L] ^ 2 res <- res + (2 * h1sq + threehth) / (6 * hph) * fx[n] + (h1sq + threehth) / sixh2 * fx[n - 1L] - (h1sq * h[n - 1L]) / (sixh2 * hph) * fx[n - 2L] } res } |
See also[edit]
- Newton–Cotes formulas
- Gaussian quadrature
Notes[edit]
- ^ Atkinson 1989, equation (5.1.15).
- ^ a b Süli & Mayers 2003, §7.2.
- ^ Atkinson 1989, p. 256.
- ^ Atkinson 1989, pp. 257–258.
- ^ Süli & Mayers 2003, §7.5.
- ^ a b Matthews 2004.
- ^ Weisstein, Equation 35.
- ^ a b Kalambet, Kozmin & Samokhin 2018.
- ^ Shklov 1960.
- ^ Cartwright 2017, Equation 8. The equation in Cartwright is calculating the first interval whereas the equations in the Wikipedia article are adjusting for the last integral. If the proper algebraic substitutions are made, the equation results in the values shown..
References[edit]
- Atkinson, Kendall E. (1989). An Introduction to Numerical Analysis (2nd ed.). John Wiley & Sons. ISBN 0-471-50023-2.
- Burden, Richard L.; Faires, J. Douglas (2000). Numerical Analysis (7th ed.). Brooks/Cole. ISBN 0-534-38216-9.
- Cartwright, Kenneth V. (September 2017). «Simpson’s Rule Cumulative Integration with MS Excel and Irregularly-spaced Data» (PDF). Journal of Mathematical Sciences and Mathematics Education. 12 (2): 1–9. Retrieved 18 December 2022.
- Kalambet, Yuri; Kozmin, Yuri; Samokhin, Andrey (2018). «Comparison of integration rules in the case of very narrow chromatographic peaks». Chemometrics and Intelligent Laboratory Systems. 179: 22–30. doi:10.1016/j.chemolab.2018.06.001. ISSN 0169-7439.
- Matthews, John H. (2004). «Simpson’s 3/8 Rule for Numerical Integration». Numerical Analysis — Numerical Methods Project. California State University, Fullerton. Archived from the original on 4 December 2008. Retrieved 11 November 2008.
- Shklov, N. (December 1960). «Simpson’s Rule for Unequally Spaced Ordinates». The American Mathematical Monthly. 67 (10): 1022–1023. doi:10.2307/2309244. JSTOR 2309244.
- Süli, Endre; Mayers, David (2003). An Introduction to Numerical Analysis. Cambridge University Press. ISBN 0-521-00794-1.
- Weisstein, Eric W. «Newton-Cotes Formulas». MathWorld. Retrieved 14 December 2022.
External links[edit]
- «Simpson formula», Encyclopedia of Mathematics, EMS Press, 2001 [1994]
- Weisstein, Eric W. «Simpson’s Rule». MathWorld.
- Simpson’s 1/3rd rule of integration — Notes, PPT, Mathcad, Matlab, Mathematica, Maple at Numerical Methods for STEM undergraduate
- A detailed description of a computer implementation is described by Dorai Sitaram in Teach Yourself Scheme in Fixnum Days, Appendix C
This article incorporates material from Code for Simpson’s rule on PlanetMath, which is licensed under the Creative Commons Attribution/Share-Alike License.
В правиле Симпсона 1/3 мы аппроксимируем многочлен на основе квадратичной аппроксимации. При этом каждое приближение фактически покрывает два подынтервала. Вот почему мы требуем, чтобы количество подынтервалов было четным. Некоторые аппроксимации больше похожи на прямую, чем на квадрику, но на самом деле они являются квадриками.
Формула правила Симпсона¹/₃
ₐ∫ᵇ f (x) dx = h/₃ [(y₀ + yₙ) + 4 (y₁ + y₃ + ..) + 2(y₂ + y₄ + ..)]
where,
a, b is the interval of integration
h = (b – a)/ n
y₀ means the first terms and yₙ means last terms.
(y₁ + y₃ + ..) means the sum of odd terms.
(y₂ + y₄ + …) means sum of even terms.
Пример: Найдите решение, используя правило 1/3 Симпсона.
| Икс | е(х) |
|---|---|
| 0,0 | 1.0000 |
| 0,1 | 0,9975 |
| 0,2 | 0,9900 |
| 0,3 | 0,9776 |
| 0,4 | 0,8604 |
Решение:
Using Simpson’s 1/3 rule
ₐ∫ᵇ f (x) dx = h/₃ [(y₀ + yₙ) + 4 (y₁ + y₃ + …) + 2 (y₂ + y₄ + …)]
h = 0.1
ₐ∫ᵇ f (x) dx = 0.1/3 [(1+0.8604)+4×(0.9975+0.9776)+2×(0.99)]
ₐ∫ᵇ f (x) dx = 0.1/3 [(1+0.8604)+4×(1.9751)+2×(0.99)]
ₐ∫ᵇ f (x) dx = 0.39136
Solution of Simpson’s 1/3 rule = 0.39136

В правиле Симпсона 3/8 мы аппроксимируем многочлен на основе квадратичной аппроксимации. Однако каждое приближение фактически покрывает три подынтервала вместо двух.
Формула правила Симпсона 3/8
ₐ∫ᵇ f (x) dx = 3h/8[(y₀ + yₙ) + 3(y₁ + y₂ + y₄ + …) + 2(y₃ + y₆ +…)]
where,
a, b is the interval of integration
h = (b – a )/ n
y₀ means the first terms and yₙ means the last terms.
( y₁ + y₂ + y₄ + … ) means the sum of remaining terms.
( y₃ + y₆ +…) means the multiples of 3.
Пример: Найдите решение, используя правило 1/3 Симпсона.
| Икс | е(х) |
|---|---|
| 0,0 | 1.0000 |
| 0,1 | 0,9975 |
| 0,2 | 0,9900 |
| 0,3 | 0,9776 |
| 0,4 | 0,8604 |
Решение:
Using Simpson’s 3/8 rule:
ₐ∫ᵇ f (x) dx = 3h/8[(y₀ + yₙ) + 3(y₁ + y₂ + y₄ + …) + 2(y₃ + y₆ +…)]
h = 0.1
ₐ∫ᵇ f (x) dx = 3h/8 [(y0+y4)+2(y3)+3(y1+y2)]
ₐ∫ᵇ f (x) dx = 3* 0.1/8 [(1+0.8604)+2×(0.9776)+3×(0.9975+0.99)]
ₐ∫ᵇ f (x) dx = 3* 0.1/8 [(1+0.8604)+2×(0.9776)+3×(1.9875)]
ₐ∫ᵇ f (x) dx = 0.36668
Solution of Simpson’s 3/8 rule = 0.36668
Ниже приведена таблица различий между правилом Симпсона 1/3 и правилом Симпсона 3/8.
| старший нет |
Правило Симпсона 1/3 |
Правило Симпсона 3/8 |
|---|---|---|
| 1. | Он аппроксимирует функцию y = f(x) параболой, т.е. полиномом 2-го порядка. | Он аппроксимирует функцию y = f(x) параболой, т.е. полиномом 3-го порядка. |
| 2. | В этом случае шансы на ошибку больше, чем правило Симпсона 3/8. | В этом случае вероятность ошибки меньше. |
| 3. | Интегральная функция может быть рассчитана как = h/3 [(сумма 1-й и последней ординат) + 4 (сумма нечетных ординат) + 2 (сумма четных ординат)]. | Интегральная функция может быть рассчитана как = 3h/8 [(сумма 1-й и последней ординат) + 2 (сумма кратных 3 ординат) + 3 (сумма остальных ординат)]. |
| 4. |
Оценка ошибки усечения по правилу Симпсона 1/3 равна E< -nh 5 /180 y iv (x), где h = (ba)/n |
Оценка ошибки усечения по правилу Симпсона 3/8 равна E< -nh5/90 y iv(x), где h = (ba)/n |
| 5. | Это правило применяется, когда N — четное число. | Это правило применяется, когда N кратно 3. |