Показатели качества сау
Количественные оценки
качества, так называемые прямые показатели
качества, определяются по кривой
переходного процесса (рис.16).
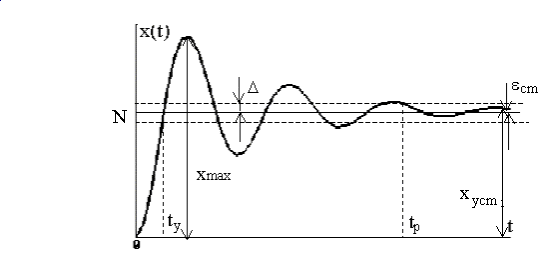
Рис.16. Переходная
функция и показатели качества
Используются следующие
прямые показатели качества:
-
величина
перерегулирования
,
![]() ;
;
характеризует
максимальное отклонение регулируемой
величины от ее установившегося значения,
которое может быть определено в
соответствии с теоремой о конечном
значении оригинала
![]() ;
;
-
время
переходного процесса или время
регулирования tp
– наименьшее значение времени, после
которого имеет место неравенство
![]() ,
,
где
— заданная величина, обычно лежащая в
пределах =0,02÷0,05;
3)
статическая ошибка сm
–
величина отклонения установившегося
значения регулируемой величины x()
от требуемого значения
N
![]()
или
![]() ,
,
гдеE(p)– изображение ошибки;
4)
время регулирования tр
– промежуток времени, по истечении
которого регулируемая величина первый
раз достигает установившегося значения.
Для определения
качества системы могут использоваться
и другие показатели, соответствующие
решаемой задаче, например, число колебаний
регулируемой величины за время
регулирования, частота и период колебаний
и т.д.
Во всех случаях
необходимо построить переходную функцию.
Коэффициенты ошибок
Точность САУ в
установившемся режиме, при относительно
медленно изменяющихся воздействиях,
может быть оценена с помощью коэффициентов
ошибок. Изображение ошибки определяется
выражением
![]() ,
,
где
![]() —
—
передаточная функция по ошибке.
Разложим передаточную
функцию системы по ошибке в степенной
ряд в окрестности точки p=0.
Отметим, что приp0,tи именно
поэтому мы говорим о точности в
установившемся режиме.
![]()
Обозначим:
![]() и получим
и получим
![]() ,
,
(8)
![]() .
.
Учитывая, что оператор
p, умноженный на
изображение самой величины, является
символом дифференцирования, можно для
оригиналов записать
![]() .
.
(9)
Выражение (9) определяет
зависимость ошибки регулирования от
различных составляющих входного
воздействия, коэффициенты Kiполучили название коэффициентов ошибок:
-
K0— коэффициент ошибки по положению;
-
K1—
коэффициент ошибки по скорости; -
K2– коэффициент ошибки по ускорению и
т.д.
Из (8) следует, что
 .
.
Численные значения
коэффициентов ошибок определяются из
этого выражения при p0.
 .
.
Очевидно, что К0=Ф(0).
Входное воздействие
можно представить в виде степенного
ряда
![]() ,
,
где g0– постоянная величина, характеризующая
начальное значение, g1=const – скорость
изменения входного воздействия, g2=const – ускорение и т.д.
Тогда
![]() .
.
Пусть передаточная
функция разомкнутой системы имеет вид
![]() ,
,
где - порядок астатизма системы. Для
передаточной функции замкнутой системы
по ошибке получим
![]() .
.
Изображение ошибки
запишется в виде
![]() .
.
Отсюда следует, что
если порядок астатизма больше порядка
старшей производной воздействия, т.е.
>m, то ошибка в
установившемся режиме будет равна нулю.
Если=m, то установившаяся
ошибка будет равна постоянной величине,
называемой статической ошибкой. И если<m, то при tи. В отношении
коэффициентов ошибок последнее выражение
позволяет сделать следующие выводы.
1). Если система
статическая, т.е.=0,
то существуют все составляющие ошибки
и все коэффициенты ошибок не равны нулю,
т.к.К0 = Ф(0)
0.
2).Система с астатизмом
1-го порядка,
=1, не имеет ошибки по положению иК0=0.
3).Система с астатизмом
2-го порядка,
=2, не имеет ошибок по положению и по
скорости иК0 =0,К1=0.
Этот список можно
продолжить. Таким образом, повышение
порядка астатизма повышает точность
системы в установившемся режиме. Но
повышение порядка астатизма снижает
запасы устойчивости, т.к. введение
интегрирующих звеньев увеличивает
фазовое запаздывание (снижает частоту
). Поэтому на
практике порядок астатизма выше второго
не применяют, а чаще всего ограничиваются
астатизмом первого порядка, используя
для повышения точности другие способы.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Как отмечалось, ошибка САУ в установившемся режиме является одним из показателей качества системы. В случае медленно изменят ющихся задающего или возмущающего воздействий ошибку системы в установившемся режиме удобно определять с помощью коэффициентов ошибок.
Ошибка следящей системы  вызываемая изменением задающего воздействия а
вызываемая изменением задающего воздействия а  в соответствии с (2.61), может быть определена
в соответствии с (2.61), может быть определена
с помощью передаточной функции системы по ошибке 

Предположим, что  можно разложить в степенной ряд относительно
можно разложить в степенной ряд относительно  сходящийся, по крайней мере, при малых значениях
сходящийся, по крайней мере, при малых значениях 

Тогда, согласно (4.22), можно записать

Этот ряд сходится в окрестности точки  Поэтому будет сходиться и оригинал ряда (4.24) при
Поэтому будет сходиться и оригинал ряда (4.24) при  т. е. ряд, в который можно разложить ошибку системы в установившемся режиме:
т. е. ряд, в который можно разложить ошибку системы в установившемся режиме:

Отсюда видно, что в общем случае ошибка системы в установившемся режиме состоит из ряда слагаемых, пропорциональных как входному сигналу  так и его производным. Слагаемые, входящие в ряд ошибок, обычно называют так:
так и его производным. Слагаемые, входящие в ряд ошибок, обычно называют так:  — ошибкой по положению (по сигналу);
— ошибкой по положению (по сигналу);  — ошибкой, вызываемой скоростью;
— ошибкой, вызываемой скоростью;  — ошибкой, вызываемой ускорением задающего воздействия и т.д., а постоянные
— ошибкой, вызываемой ускорением задающего воздействия и т.д., а постоянные  — коэффициентами ошибок. Ошибки в установившихся режимах, вызываемые изменяющимся задающим воздействием, называются динамическими. Зная коэффициенты ошибок и закон изменения задающего воздействия а
— коэффициентами ошибок. Ошибки в установившихся режимах, вызываемые изменяющимся задающим воздействием, называются динамическими. Зная коэффициенты ошибок и закон изменения задающего воздействия а  с помощью формулы (4.25) можно определить ошибку системы в установившемся режиме.
с помощью формулы (4.25) можно определить ошибку системы в установившемся режиме.
Коэффициенты ошибок выразим через параметры системы. Передаточная функция системы по ошибке связана с передаточной функцией  разомкнутой системы выражением
разомкнутой системы выражением

Учитывая, что передаточная функция системы с астатизмом  порядка в разомкнутом состоянии имеет вид
порядка в разомкнутом состоянии имеет вид

где  передаточная функция по ошибке в соответствии с выражением (4.26) будет равна:
передаточная функция по ошибке в соответствии с выражением (4.26) будет равна:

где  коэффициенты с равны сумме коэффициентов
коэффициенты с равны сумме коэффициентов  при одинаковых степенях
при одинаковых степенях 
При  (статическая система):
(статическая система):

При  (астатическая система с астатизмом
(астатическая система с астатизмом  порядка):
порядка):

На основании (4.23) и (4.27) можно записать

откуда

Раскрывая скобки в правой части полученного выражения и приравнивая коэффициенты правой и левой частей при одинаковых степенях  можно получить систему уравнений, из которой затем можно определить коэффициенты ошибок через коэффициенты с и о уравнения САУ. Значения коэффициентов ошибок будут различными для систем с различными порядками астатизма. Найдем сначала коэффициенты ошибок для статической системы
можно получить систему уравнений, из которой затем можно определить коэффициенты ошибок через коэффициенты с и о уравнения САУ. Значения коэффициентов ошибок будут различными для систем с различными порядками астатизма. Найдем сначала коэффициенты ошибок для статической системы 
Приравнивая члены левой и правой частей выражения (4.31) при одинаковых степенях  и учитывая, что
и учитывая, что  получаем следующую систему уравнений:
получаем следующую систему уравнений:

из которой можно определить коэффициенты ошибок для статической системы. Из первого уравнения находим  или, если принять во внимание, что
или, если принять во внимание, что  а также, что для случая
а также, что для случая  в соответствии с формулой
в соответствии с формулой  то
то 
Из второго уравнения находим

Аналогично можно определить и другие коэффициенты ошибок.
Таблица 4.3. (см. скан) Коэффициенты ошибок статической и астатических систем
Коэффициенты ошибок астатической системы с астатизмом первого порядка могут быть найдены из системы уравнений, полученной из выражения (4.31) приравниванием коэффициентов его левой и правой частей при одинаковых степенях  при учете, что
при учете, что 

Из первого уравнения  из второго уравнения с учетом (4.29):
из второго уравнения с учетом (4.29):

Аналогично определяются остальные коэффициенты ошибок.
В табл. 4.3 приводятся несколько первых коэффициентов ошибок Для статической и астатических систем первого и второго порядков астатизма. В качестве примера определим установившиеся ошибки САУ, обладающих различными порядками астатизма при разных задающих воздействиях.
Пример 3. Задающее воздействие изменяется по закону ступенчатой функции а  (табл. 4.4). Определить установившиеся ошибки в следящих системах, имеющих порядок астатизма
(табл. 4.4). Определить установившиеся ошибки в следящих системах, имеющих порядок астатизма 
1. Определяем производные 

Таблица 4.4. Характер реакций систем на различные задающие воздействия

2. С учетом (4.34) выражение (4.25) для ошибки принимает вид

т. е. при ступенчатом воздействии появляется только ошибка по положению.
3. Для определения  в статической системе
в статической системе  подставляем из табл. 4.3 значение
подставляем из табл. 4.3 значение  в формулу (4.35):
в формулу (4.35):  т. е. при ступенчатом задающем воздействии в статической системе возникает постоянная ошибка по положению. Эта ошибка при данном
т. е. при ступенчатом задающем воздействии в статической системе возникает постоянная ошибка по положению. Эта ошибка при данном  будет тем меньше, чем больше
будет тем меньше, чем больше  системы.
системы.
4. Установившиеся ошибки в астатических системах с астатизмом  порядка
порядка  и с астатизмом 2-го порядка
и с астатизмом 2-го порядка  т. е. ошибка по положению, а следовательно, и вся установившаяся ошибка в астатических системах при ступенчатом задающем воздействии равна нулю.
т. е. ошибка по положению, а следовательно, и вся установившаяся ошибка в астатических системах при ступенчатом задающем воздействии равна нулю.
Реакции следящих систем с порядками астатизма  на ступенчатое задающее воздействие изображены в табл. 4.4.
на ступенчатое задающее воздействие изображены в табл. 4.4.
Пример 4. Задающее воздействие изменяется по закону а  (см. табл. 4.4). Определить
(см. табл. 4.4). Определить  в следящих системах с порядком астатизма
в следящих системах с порядком астатизма 
1. Определяем производные от 

 Учитывая, что вторая и более высокие производные от а
Учитывая, что вторая и более высокие производные от а  равны нулю, формула (4.25) примет вид
равны нулю, формула (4.25) примет вид

т. е. при линейно возрастающем задающем воздействии возможно появление в системе динамических ошибок по положению и по скорости.
3. Для определения  в статической системе
в статической системе  подставляем из табл. 4.3 значения
подставляем из табл. 4.3 значения  в формулу (4.36):
в формулу (4.36):

т. е. в статической системе имеются ошибки по положению и по скорости. Ошибка
по положению при изменении задающего воздействия с постоянной скоростью возрастает во времени и поэтому  системы стремится к бесконечности.
системы стремится к бесконечности.
4. Установившаяся ошибка астатической системы с астатизмом  порядка
порядка 

т. е. в системе с астатизмом  порядка ошибка по положению равна нулю (так как
порядка ошибка по положению равна нулю (так как  Скоростная ошибка постоянна. Она пропорциональна скорости
Скоростная ошибка постоянна. Она пропорциональна скорости  изменения задающего воздействия и обратно пропорциональна коэффициенту усиления системы в разомкнутом состоянии
изменения задающего воздействия и обратно пропорциональна коэффициенту усиления системы в разомкнутом состоянии  Выражение (4.37) для скоростной ошибки, полученное с помощью коэффициентов ошибок, совпадает с ранее полученной формулой (2.75).
Выражение (4.37) для скоростной ошибки, полученное с помощью коэффициентов ошибок, совпадает с ранее полученной формулой (2.75).
5. Установившаяся ошибка астатической системы с астатизмом  порядка
порядка  т. е. в системе с астатизмом
т. е. в системе с астатизмом  порядка
порядка  при изменении
при изменении  с постоянной скоростью равна нулю. Это объясняется тем, что коэффициенты ошибок
с постоянной скоростью равна нулю. Это объясняется тем, что коэффициенты ошибок  , следовательно, ошибка по положению и по скорости в этой системе равны нулю.
, следовательно, ошибка по положению и по скорости в этой системе равны нулю.
Реакции следящих систем на задающее воздействие а  изображены в табл. 4.4.
изображены в табл. 4.4.
Пример 5. Задающее воздействие  где
где  — начальное значение
— начальное значение  — начальное значение скорости изменения а
— начальное значение скорости изменения а  — ускорение а
— ускорение а  Определить
Определить  в следящих системах с порядками астатизма
в следящих системах с порядками астатизма 
1. Определяем производные от а 

2. С учетом (4.38) выражение (4.25) принимает вид

т. е. при равноускоренном изменении задающего воздействия возможно появление в системе динамических ошибок по положению, скоростной ошибки и ошибки по ускорению.
3. Установившиеся динамические ошибки:
в статической системе 

в астатической системе с астатизмом  порядка
порядка 
т. е. при равноускоренном изменении задающего воздействия в системе с астатизмом  порядка
порядка  растет во времени до бесконечности;
растет во времени до бесконечности;
в астатической системе с астатизмом  порядка
порядка  постоянна. Она пропорциональна ускорению
постоянна. Она пропорциональна ускорению  и обратно пропорциональна
и обратно пропорциональна  системы.
системы.
Реакции систем на задающее воздействие  изображены в табл. 4.4,
изображены в табл. 4.4,

Точность САУ

План 1 Общие положения 2 Понятие о типовых режимах САУ 3 Теорема о предельном значении оригинала и методика определения установившихся ошибок 4 Ошибки статических и астатических САУ в типовых режимах 5 Ошибки САУ при произвольных входных сигналах (коэффициенты ошибок) 6 Методы повышения точности САУ

1 Общие положения Точность является важнейшим критерием качества систем. В настоящее время практически все многочисленные элементы любых технических систем изготавливаются автоматически т. е. с помощью САУ. Таким образом точность САУ определяет качество продукции, товаров, их надежность, энергопотребление, долговечность и т. д. и т. п.

2 Понятие о типовых режимах САУ Точность САУ принято оценивать по величине ошибок в типовых режимах. Типовыми называются режимы просто описываемые математически и имеющие четкий физический смысл. К ним относятся: — режим покоя, когда х(t)=const; — режим линейно-нарастающих сигналов, когда х(t)=a*t, где а=const; — режим гармонических входных сигналов, когда х(t)=A*sinωt.
 при t→∞, при типовых режимах и")
ε Итак, нам необходимо вычислить установившуюся ошибку ε(t) при t→∞, при типовых режимах и по ней можно будет судить о точности САУ.

3 Теорема о предельном значении оригинала и методика определения установившихся ошибок Сформулируем для этого теорему о предельном значении оригинала: lim. X(t)=lim. X(s), t→ ∞ s→ 0 т. е. предел оригинала при t→∞ равен пределу изображения по Лапласу при s→ 0.
 ошибку САУ")
Передаточная функция САУ по ошибке: Итак, чтобы определить установившуюся (при t→ ∞) ошибку САУ нужно: — Найти x(s) зная x(t) — Определить Fε(s) — Найти ε(s)= X(s) * Fε (s) — Определить εуст= lim ε(s) S→ 0

4 Ошибки статических и астатических САУ в типовых режимах Рассмотрим ошибки САУ в типовых режимах: 1. Ошибка САУ в покое (статическая ошибка) X(t)=X 0=const X(s)=X 0 Пусть — статическая САУ, поскольку в знаменателе нет множителя S, т. е. интегрирующего элемента в системе
 Подставляя Wp(s) в (1) получим:")
По теореме о предельном значении аргумента (1) Подставляя Wp(s) в (1) получим:
 раз меньше входной величины. y(t) X 0")
Статическая ошибка в статической САУ в (1+К) раз меньше входной величины. y(t) X 0 εст t

Пусть теперь — астатическая САУ (есть интегратор, т. е. множитель S в знаменателе передаточной функции)
 X 0 εст=0 t")
Таким образом, статическая ошибка в астатической САУ равна 0 y(t) X 0 εст=0 t
 x(t)=at a=cost Пусть:")
2. Второй типовой режим — движение с постоянной скоростью (скоростная ошибка) x(t)=at a=cost Пусть: — статическая САУ Тогда:
=at εα→∞ y(t) α t tgα=a Ошибка в статической САУ при линейнонарастающем входном сигнале")
x(t)=at εα→∞ y(t) α t tgα=a Ошибка в статической САУ при линейнонарастающем входном сигнале x(t)=at возрастает до ∞. Т. о. статические САУ в таком режиме не работоспособны.

Пусть теперь — астатическая САУ Тогда
 y(t) t Т. о. в астатических САУ при x(t)=at a=const устанавливается ошибка в")
x(t) y(t) t Т. о. в астатических САУ при x(t)=at a=const устанавливается ошибка в “К” раз меньше чем “a”, т. е. они работоспособны в таких режимах.
=xmsinωkt xm, ωk – амплитуда и")
3. Третий режим — гармонических входных сигналов. Пусть x(t)=xmsinωkt xm, ωk – амплитуда и частота “качки”. x(s) ε(s) Wp(S) y(s)

Определим амплитуду εm ошибки САУ в этом режиме. Для этого найдем: — ПФ САУ по ошибке Подставим S=jωk (1)
 справедливо и для амплитуд, т. е. Откуда следует: (2) Ак 20 lg")
Выражение (1) справедливо и для амплитуд, т. е. Откуда следует: (2) Ак 20 lg xm L(ω) Прологарифмируем (2): em ω ω=ωk Ак – контрольная точка (3)
 следует, что САУ будет иметь амплитуду ошибки не более допустимой εдоп, если")
Из (3) следует, что САУ будет иметь амплитуду ошибки не более допустимой εдоп, если

Т. о. чтобы ошибка САУ в гармоническом режиме не превышала допустимой εдоп необходимо: 1. Определить положение контрольной точки Ак с координатами: ω=ωк и 2. Обеспечить прохождение L(ω) выше контрольной точки Ак
 Пусть на вход САУ действует")
5 Ошибки САУ при произвольных входных сигналах (коэффициенты ошибок) Пусть на вход САУ действует сигнал x(t) произвольной формы. Чтобы определить ошибку ε(t) в этом случае найдем вначале ее изображение. x(s) ε(s) Wp(S) y(s)
 То: (2) Разложим далее Fε(s) по возрастающим степеням S в ряд, тогда")
Поскольку: (1) То: (2) Разложим далее Fε(s) по возрастающим степеням S в ряд, тогда (2) можно записать в виде: (3)
 к оригиналам можно записать (4) Величины")
При нулевых начальных условиях и переходя в (3) к оригиналам можно записать (4) Величины С 0, С 1, С 2 … называются коэффициентами ошибок САУ.
 необходимо: 1. Определить передаточную")
Чтобы определить ошибку САУ при произвольной форме входного сигнала x(t) необходимо: 1. Определить передаточную функцию САУ по ошибке Fε(s); 2. Разложить в ряд Fε(s) путем деления ее числителя на знаменатель и найти коэффициенты С 0, С 1, С 2 …; 3. Подставить коэффициенты ошибок в (4) и найти установившуюся ошибку ε(t).

Пример Найти ошибку в САУ при: Если:

Решение: 1. Найдем
 в степенной ряд путем деления числителя на знаменатель - -")
2. Разложим (1) в степенной ряд путем деления числителя на знаменатель — —
 имеет лишь три не")
Ограничимся первыми тремя членами ряда, т. к. входной сигнал X(t) имеет лишь три не нулевых первых производных.
 Сопоставляя (5) и (4) имеем коэффициенты ошибок: С 0=0 (6)")
3. Итак: (5) Сопоставляя (5) и (4) имеем коэффициенты ошибок: С 0=0 (6)
: (7)")
4. Определим далее производные от X(t): (7)
 в (4)")
5. Подставляя коэффициенты С 0, С 1, С 2… и производные (7) в (4) получим: Т. е. ошибка с течением времени будет нарастать до ∞ из-за члена “bt”.

6 Методы повышения точности САУ Анализируя выражения для коэффициентов ошибок отметим, что: 1. Все коэффициенты обратнопропорциональны коэффициенту К – усиления системы; 2. Чем выше порядок астатизма “v” тем большее количество первых коэффициентов ошибок равны 0

ВНИМАНИЕ Порядок астатизма “v” определяется числом интегрирующих звеньев в контуре системы. Формально “v” равно показателю степени множителя S в знаменателе передаточной функции wp.

1. Первый способ повышения точности САУ – увеличение К Т. о. самым универсальным способом повышения точности САУ являются увеличение коэффициента К усиления системы. При этом все коэффициенты ошибок уменьшаются, а это означает, что система во всех режимах работы будет иметь меньшие ошибки. Однако этот способ снижает запасы устойчивости системы и рано или поздно приводит к полной потере устойчивости. Это можно показать на примере критерия Найквиста.
 Re")
Im K 2>K 1 К 2 -1; j 0 wp(jω) Re

2. Способ повышения точности САУ – путем увеличения астатизма “v” Этот способ исключает первые коэффициенты в ряду ошибок. Действительно: v=0 (статическая САУ) Все коэффициенты не равны 0, т. е. с0≠ 0 с1≠ 0 с2≠ 0 …, т. е. статическая система в любых режимах работы, в т. ч. и в покое будет иметь ошибки
 с0=0 с1≠ 0 с2≠ 0 …, т.")
v=1 (астатическая САУ с астатизмом первого порядка) с0=0 с1≠ 0 с2≠ 0 …, т. е. такая система не будет иметь ошибки в режиме покоя. v=2 (астатическая САУ с астатизмом второго порядка) с0=0 с1=0 с2≠ 0 с3≠ 0 …, такая система не будет иметь ошибок не только в режиме покоя, но и при линейнонарастающем сигнале

К сожалению, этот способ также снижает запасы устойчивости САУ. Действительно: Im v=2 Re -1; j 0 v=1 По критерию Найквиста системы при v=0, v=1 могут быть как устойчивыми так и не устойчивыми, но при v=2 они становятся не устойчивыми при любых коэффициентах К.

3. Повышение точности САУ с использованием принципов комбинированного управления. Принцип комбинированного управления состоит в том, что в дополнение к принципу обратной связи реализуется принцип управления по возмущению. V(t) Измеритель x(t) y(t) Регулятор Объект
 оба названных принципа: - Управление по возмущению (за счет измерения возмущения")
Здесь сочетается (комбинируются) оба названных принципа: — Управление по возмущению (за счет измерения возмущения v(t) и выработки дополнительного управляющего сигнала компенсирующего действия возмущения); — Управление по отклонению или принцип обратной связи реализуется за счет главной отрицательной обратной связи и сигнала рассогласования и регулятора.

Рассмотрим следящую систему с комбинированным управлением и найдем передаточную функцию обычной системы эквивалентной по точности. W 3(S) x(s) W 1(s) W 2(S) y(s) ≡ Wэ(S)
")
Для этого приравняем их передаточные функции. (1)
 после некоторых преобразований можно получить: (2) Как видно из последнего выражения, при:")
Из (1) после некоторых преобразований можно получить: (2) Как видно из последнего выражения, при: (3) wэ(s)=∞ Условие (3) называется условием полной инвариантности.

Это означает, что ошибка рассматриваемой комбинированной следящей системы будет равна 0 в любых режимах работы поскольку:
 устойчивости и")
Достоинство принципа комбинированного управления в том, что он не изменяет (не ухудшает) устойчивости и качества переходных процессов. Однако, реализовать точно условие полной инвариантности практически невозможно.

ПРИМЕР Пусть: Найдем:
 w 1(s)")
Структурная схема такой комбинированной следящей системы имеет вид: III II I x(s) w 1(s) y(s)

Итак, чтобы точно реализовать условие полной инвариантности в нашем примере необходимо: • реализовать канал I (тахогенератор) • реализовать канал II (это 2 -ая производная от угла) • реализовать канал III (это 3 -ая производная от угла) Точно это сделать практически нельзя. Кроме того, в реальных САУ имеется множество нелинейностей, которые мы не учитывали при выводе условия полной инвариантности. Поэтому часто используют частично-инвариантные САУ, т. е. САУ не имеющие ошибок лишь в некоторых режимах.