Интегральная квадратичная ошибка
Cтраница 1
Интегральная квадратичная ошибка определяется как интеграл квадратов мгновенных ( текущих) значений рассогласования. При возведении в квадрат текущих значении рассогласования отрицательные величины не компенсируют положительные, поэтому с возрастанием рассогласования интегральная квадратичная ошибка растет очень быстро.
[1]
Эти коэффициенты соответствуют минимуму интегральной квадратичной ошибки между f ( t) и апроксимирующей функцией, что вытекает из (9.81), если Г оо. Полная функция f ( t) подбирается так, чтобы при этом значении Т получить наилучшую апроксимацию.
[2]
В этом разделе в качестве критерия оценки точности апроксимации применяется интегральная квадратичная ошибка. Выбор этого критерия диктуется главным образом удобством его применения; вместе с тем во многих конкретных случаях он служит весьма хорошей оценкой точности апроксимации. В нем одинаково учитываются как положительные, так и отрицательные ошибки. Критерий интегральной квадратичной ошибки достаточно хорошо оценивает большие и длительные ошибки, а малые и кратковременные ошибки слабо сказываются на его величине.
[3]
Экспоненциальные функции не являются ортогональными в любом интервале, так что критерий минимума интегральной квадратичной ошибки к такому ряду функций приложить нелегко.
[4]
С усилением интегрального воздействия ( уменьшение времени интегрирования) процесс из апериодического переходит в колебательный со все более уменьшающейся степенью затухания; при этом динамическая ошибка регулирования уменьшается, а время регулирования и интегральная квадратичная ошибка регулирования возрастают.
[5]
Для выбора наиболее рациональных с точки зрения технологии переходных процессов по каналам регулирования обычно выполняются расчеты для четырех процессов регулирования: без перерегулирования, с 20 % — ным перерегулированием, с минимальным временем регулирования и с минимальной интегральной квадратичной ошибкой.
[7]
Интегральные ошибки этих трех переходных процессов равны, так как настройки диапазона пропорциональности и времени изо-дрома регулятора во всех случаях одинаковы. Интегральная квадратичная ошибка последнего переходного процесса меньше, чем у первых двух, так как он имеет меньшую динамическую ошибку.
[9]
В частности, это имеет место для систем с симметричными и кососимметрич-ньгми матрицами А в силу ортогональности их канонических базисов. Эквивалентные сепаратные системы равноправны с точки зрения квадратичной оценки для системы в целом: значения их интегральных квадратичных ошибок входят в сумму ( ИЗ) с одинаковым весом.
[10]
Интегральная квадратичная ошибка определяется как интеграл квадратов мгновенных ( текущих) значений рассогласования. При возведении в квадрат текущих значении рассогласования отрицательные величины не компенсируют положительные, поэтому с возрастанием рассогласования интегральная квадратичная ошибка растет очень быстро.
[11]
Для большинства методов решения задачи синтеза оптимальных виброзащитных систем характерны следующие принципы: используется линейная динамическая модель с одной степенью свободы; для системы с двумя степенями свободы рассматриваются лишь частные случаи синтеза; учитывается не более одного ограничения; для одной и той же модели изменение спектральной плотности воздействия приводит к необходимости повторения процесса решения задачи. Например, для синтеза оптимальной системы с активным динамическим гасителем колебаний ( судовых механизмов и машин) был выбран метод минимально-квадратичной оптимизации, позволяющий синтезировать системы с наименьшим значением интегральной квадратичной ошибки при учете ограничений, накладываемых объектом.
[12]
На практике наиболее широкое распространение при оценке качества работы ристем регулирования получили интегральная и интегральная квадратичная ошибки. Принципиальное отличие между ними состоит в том, что вторая учитывает абсолютное значение ошибки. Например, две кривые переходного процесса с различными амплитудами колебаний параметра могут иметь одинаковые интегральные ошибки, но разные интегральные квадратичные ошибки.
[13]
В этом разделе в качестве критерия оценки точности апроксимации применяется интегральная квадратичная ошибка. Выбор этого критерия диктуется главным образом удобством его применения; вместе с тем во многих конкретных случаях он служит весьма хорошей оценкой точности апроксимации. В нем одинаково учитываются как положительные, так и отрицательные ошибки. Критерий интегральной квадратичной ошибки достаточно хорошо оценивает большие и длительные ошибки, а малые и кратковременные ошибки слабо сказываются на его величине.
[14]
Страницы:
1
2
![]()
© К.Ю. Поляков, 2009
сто дисперсий использовать соответствующие среднеквадратические отклонения – σε = Dε и
σu = Du , которые измеряются в тех же единицах, что и исходные величины. Этот график показывает, какая мощность управления требуется, чтобы обеспечить заданную точность стаби-
|
лизации. Наоборот, по графику можно определить, какую точ- σ |
||
|
ность можно обеспечить, имея заданную мощность управления. |
u |
|
|
В этом смысле можно называть эту кривую кривой качества |
||
|
системы. |
||
|
Каждая точка этой кривой соответствует какому-то Паре- |
||
|
то-оптимальному регулятору. Поскольку для таких регуляторов |
||
|
нельзя одновременно уменьшить оба показателя качества, вы- |
||
|
пуклость кривой всегда направлена в сторону начала коорди- |
σε |
|
|
нат. Серая область недостижима, то есть, ни один регулятор в |
||
|
такой системе не может обеспечить соответствующее качество. |
51
© К.Ю. Поляков, 2009
6. Оптимальные следящие системы
6.1. Постановка задачи
Задача следящей системы – отслеживать на выходе z сигнал r , подаваемый на вход. Например, систему автоматического управления курсом корабля (автопилот) можно рассматривать как следящую систему ( r – заданный курс, z – фактический курс).
Точность следящей системы определяется свойствами сигнала ошибки ε = r − z :
Если эталонный (задающий) сигнал r – случайный процесс с известной спектральной плотностью, мы получаем задачу оптимизации при случайных возмущениях, варианты которой были рассмотрены ранее.
Здесь мы остановимся на задаче оптимизации при детерминированных (известных, определенных, неслучайных) возмущениях. Это означает, что мы знаем входной сигнал r (например, его изображение по Лапласу R(s) ). При этом требуется обеспечить «малость» ошибки ε в
некотором смысле. В идеальном случае ошибка равна нулю для любого момента времени. В реальных системах этот результат чаще всего недостижим, поскольку требует бесконечно большого управления.
Предположим, что входной сигнал имеет ступенчатый вид, причем можно считать, что его изменение происходит достаточно редко, так что при очередном скачке переходный процесс, вызванный предыдущим изменением, уже закончился. В этом случае имеет смысл строить систему, оптимальную для единичного скачка на входе. Так как система линейная, при любом изменении величины скачка она останется оптимальной (изменится только величина сигналов).
В идеале мы хотим, чтобы изменение входного сигнала мгновенно привело к такому же изменению на выходе. Можно догадаться, что для мгновенного перевода инерционной системы (а не просто усилителя) в новое состояние требуется бесконечное управление. Этот вариант неприемлем с практической точки зрения и нереализуем, поскольку управляющий сигнал всегда ограничен. Таким образом, реальный переходный процесс будет отличаться от идеального. Как же измерить эту ошибку, оценив ее одним числом?
|
z(t) |
ε < 0 |
||
|
r(t) |
r(t) |
||
|
z(t) |
|||
|
ε > 0 |
ε > 0 |
||
|
0 |
t |
0 |
t |
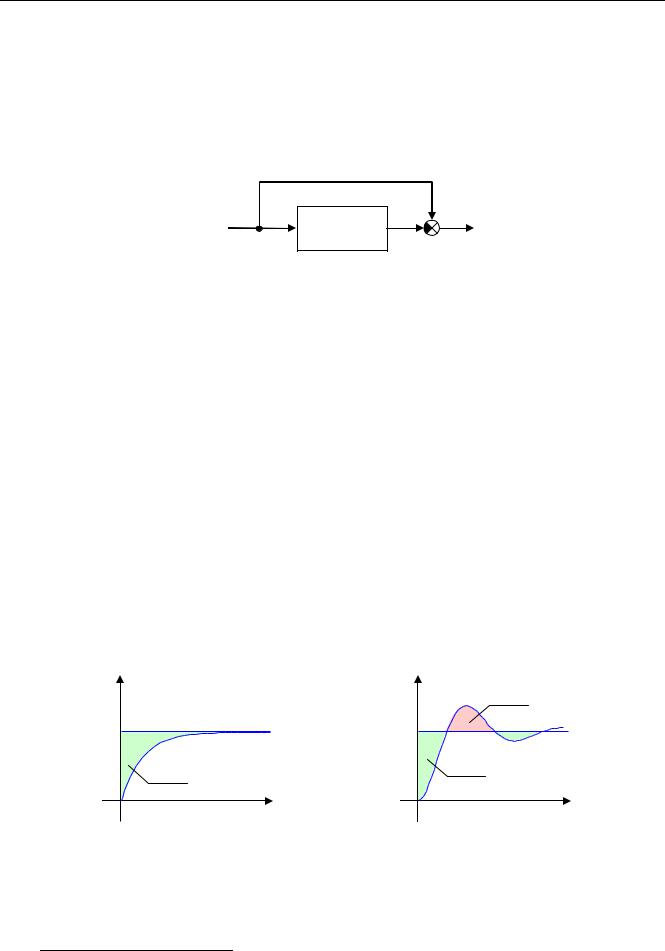
Казалось бы, можно взять интеграл от сигнала ошибки ε = r − z на интервале от 0 до бесконечности15
∞
I1 = ∫ε(t) dt ,
0
15 Чтобы такой интеграл сходился, необходимо, чтобы ошибка ε(t) стремилась к нулю при t → ∞ .
52
© К.Ю. Поляков, 2009
однако он может служить для оценки ошибки только при монотонном переходном процессе, когда ошибка всегда остается положительной (см. рисунок слева). Если процесс колебательный, на разных интервалах ошибка может принимать как положительные, так и отрицательные значения, поэтому использовать этот интеграл для оценки ошибки нельзя (см. рисунок справа).
Мы можем справиться с этой проблемой, если интегрировать модуль ошибки:
∞
I2 = ∫ ε(t) dt .
0
Такую оценку иногда используют при численной оптимизации. К сожалению, получить оптимальную передаточную функцию регулятора аналитически (по формулам) в этом случае не удается.
Удобнее всего минимизировать интеграл от квадрата ошибки (его также называют инте-
гральной квадратической ошибкой):
|
∞ |
|
|
I = ∫ε2 (t) dt . |
(28) |
|
0 |
Далее мы увидим, что задачу оптимизации по такому критерию удается свести к задаче фильтрации Винера.
6.2. Теорема Парсеваля
Для большинства задач в теории управления существует два типа решений – временное (когда рассматривается изменение сигналов во времени) и частотный (работа с передаточными функциями и частотными характеристиками).
Эти подходы не исключают, а взаимно дополняют друг друга, позволяя увидеть разные стороны одной задачи. Для построения оптимального фильтра Винера мы использовали операции с передаточными функциями (частотный метод Боде и Шеннона), хотя сам Винер впервые предложил решение этой задачи с помощью временного метода (на основе корреляционных функций).
Для того, чтобы использовать уже рассмотренные алгоритмы, нужно «перевести» задачу с критерием (28) в частотную область, то есть, выразить критерий через изображения сигналов по Лапласу и передаточные функции. Это позволяет сделать теорема Парсеваля, которая утверждает, что интеграл от квадрата функции ε(t) , которая равна нулю при t < 0 и стремится к ну-
лю при t → ∞ , равен интегралу от «квадрата» ее преобразования Лапласа E(s) :
|
∞ |
1 |
j∞ |
||
|
I = ∫ε2 (t) dt = |
∫E(s) E(−s) ds . |
(29) |
||
|
2πj |
||||
|
0 |
− j∞ |
Выражение E(s) E(−s) можно назвать «квадратом» потому что оно на мнимой оси (где берется интеграл), при подстановке s = jω , действительно является квадратом частотной характеристики E( jω) :
E( jω) E(− jω) = E( jω) 2 .
Заметим, что функционал (29) в нашей задаче (при известном входном сигнале) совпадает по форме (при X (s) = E(s) E(−s) ) с функционалом (19), который получен в задаче фильтрации
при случайных возмущениях. Поэтому для решения задачи можно использовать алгоритм, применявшийся при расчете фильтра Винера.
6.3. Эквивалентность двух задач
Теорема Парсеваля позволяет обнаружить связь между задачами анализа и синтеза при случайных (или стохастических) и детерминированных возмущениях.
Поскольку ошибка ε(t) стремится к нулю при t → ∞ , ее преобразование Лапласа E(s) – устойчивая функция (все ее полюса имеют отрицательные вещественные части). Если рассмат-
53
© К.Ю. Поляков, 2009
ривать E(s) как передаточную функцию формирующего фильтра, то можно построить соответствующую спектральную плотность Sε (ω) = E( jω) E(− jω) , так что
|
∞ |
1 |
∞ |
1 |
∞ |
|
|
∫ε2 (t) dt = |
∫Sω (ω) dω = |
∫Sω (ω) dω . |
|||
|
2π |
π |
||||
|
0 |
−∞ |
0 |
Таким образом, интеграл от квадрата функции ε(t) , стремящейся к нулю при t → ∞ , равен среднему квадрату случайного процесса, имеющего спектральную плотность Sε (ω) .
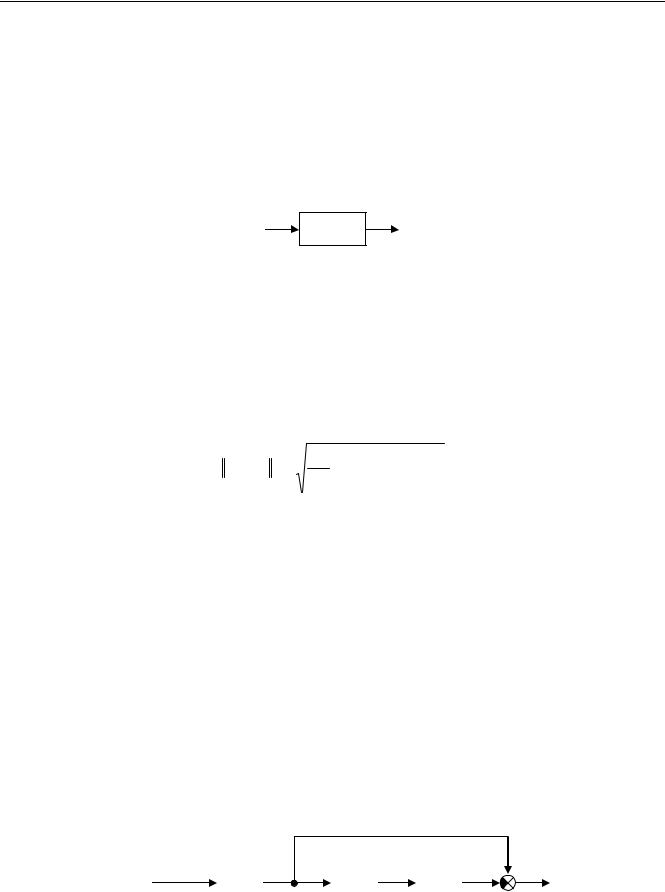
Пусть существует некоторая система с передаточной функцией W (s) . Обозначим ее входной сигнал через w(t) , а выходной – через ε(t) .
w W (s) ε
Если w – единичный центрированный белый шум, то спектральная плотность выхода ε равна Sε (s) =W (s) W (−s) , а дисперсия выхода (средний квадрат) – интегралу от спектральной
плотности по мнимой оси.
В то же время, если w – единичный импульс (дельта-функция), изображение выхода по Лапласу равно E(s) =W (s) , а интегральная квадратическая ошибка равна тому же самому инте-
гралу от W (s) W (−s) . Таким образом, вместо вычисления дисперсии выхода при белом шуме на входе можно вычислить интеграл от квадрата выходного сигнала при импульсном входе, и наоборот. Квадратный корень из этой величины называется H2 -нормой передаточной функции
W (s) :
|
1 |
j∞ |
|
|
W (s) 2 = |
∫W (s) W (−s) ds |
|
|
2πj |
− j∞ |
и вычисляется с помощью функции norm среды MATLAB.
С другой стороны, пусть передаточная функция W (s) зависит определенным образом от выбора регулятора C(s) . Тогда, как следует из сказанного, две следующие задачи оптимизации эквивалентны:
1)найти регулятор C(s) , минимизирующий дисперсию ошибки при единичном белом шуме на входе;
2)найти регулятор C(s) , минимизирующий интегральную квадратическую ошибку при по-
ступлении на вход единичного импульса (дельта-функции).
Вторая задача в теории управления называется задачей H2 -оптимизации или просто H2 — задачей (поскольку требуется обеспечить минимум H2 -нормы передаточной функции замкнутой системы), а о первой говорят как о стохастическом варианте H2 —задачи.
6.4. Разомкнутые системы
Чтобы понять особенности задачи, сначала мы рассмотрим простейшую разомкнутую систему, состоящую только из регулятора C(s) и объекта F(s) :
|
w = δ(t) |
r |
u |
z |
ε |
||||
|
R(s) |
C(s) |
P(s) |
||||||
Входной сигнал r задан в виде преобразования Лапласа R(s) , так что его можно представить как результат прохождения единичного импульса (дельта-функции δ(t) ) через звено с переда-
54

© К.Ю. Поляков, 2009
точной функцией R(s) . Такой способ общепринят при моделировании входных сигналов и по-
зволяет представить систему в стандартном виде: на входе – дельта-функция, на выходе – ошибка.
Передаточная функция системы от входа w к выходу ε равна
W (s) = (1−CP)R .
Предполагается, что все звенья устойчивы. Это значит, что все полюса функций P(s) и R(s) имеют отрицательные вещественные части и регулятор C(s) , который требуется найти, также
должен обладать этим свойством. Кроме того, регулятор должен обеспечить минимум интегральной квадратической ошибки
|
∞ |
1 |
j∞ |
|
|
I = ∫ε2 (t) dt = |
∫X (s) ds , |
||
|
2πj |
|||
|
0 |
− j∞ |
где X (s) =W W * = PP*RR*CC* − PRR*C − P*RR*C* + RR* . Подынтегральное выражение имеет
форму (18), как для задачи Винера, поэтому можно применить уже известный алгоритм поиска оптимальной устойчивой передаточной функции C(s) .
Попытаемся понять, какие результаты мы можем получить в результате оптимизации. Прежде всего, выбор регулятора из условия CP =1 сразу дает W (s) = 0 , то есть, ошибка будет
нулевой не только при ступенчатом, но и при любом другом входе. Это так называемое условие инвариантности, при котором обеспечивается идеальное слежение за эталонным сигналом. Именно такой регулятор будет получен в результате оптимизации «в лоб», если все нули передаточной функции P(s) находятся в левой полуплоскости.
Ксожалению, все не так просто. Как правило, передаточные функции реальных объектов
–строго правильные, то есть, степень их числителя меньше, чем степень знаменателя. Тогда передаточная функция регулятора C(s) =1/ P(s) будет неправильной (степень числителя больше
степени знаменателя). Как было показано при анализе задачи оптимизации при случайных возмущениях, такой регулятор неприменим в практических задачах по двум причинам:
1)регулятор содержит дифференцирующее звено, поэтому при скачкообразном изменении входного сигнала сигнал управления должен теоретически стать бесконечным;
2)регулятор усиливает высокочастотные помехи измерений вместо того, чтобы подавлять их; это делает систему неработоспособной.
Взадаче оптимизации при случайных возмущениях мы добивались «ската» частотной характеристики регулятора на высоких частотах с помощью ограничения на сигнал управления: в критерий качества вводилась дисперсия управления с некоторым весовым коэффициентом, который подстраивался методом проб и ошибок.
∞
Если формально составить критерий I = ∫[ε2 (t) + ku2u2 (t)]dt , добавив интеграл от квадрата
0
сигнала управления u(t) с весовым коэффициентом ku2 , то ничего хорошего не получится, поскольку установившееся значение u(t) при t → ∞ не равно нулю. Следовательно, интеграл
расходится и теорема Парсеваля неприменима. Оптимизация в частотной области не имеет смысла: если формально применить алгоритм синтеза, получится регулятор, для которого ошибка в установившемся режиме (при t → ∞ ) не равна нулю.
Чтобы грамотно ограничить управляющий сигнал, нужно ввести ошибку управления εu (t) , то есть отклонение фактического сигнала управления u(t) от некоторого эталонного сигнала u0 (t) , который должен быть выбран так, чтобы ошибка управления εu (t) = u0 (t) −u(t) стреми-
лась к нулю при t → ∞ . Тогда можно искать минимум критерия
∞
I = ∫[ε2 (t) + ku2εu2 (t)]dt ,
0
55
© К.Ю. Поляков, 2009
это позволит ограничить мощность управления и при этом минимизировать ошибку слежения. Изменяя коэффициент ku , мы получим семейство Парето-оптимальных регуляторов, как и в за-
даче оптимизации при случайных возмущениях.
Как же выбрать сигнал u0 (t) ? Для простоты рассмотрим только случай ступенчатого входного сигнала. Поскольку передаточная функция C(s) устойчива, установившееся значение u∞ сигнала u(t) при t → ∞ – постоянная величина, ее можно рассчитать следующим образом.
Если вход w – это единичный импульс, то установившееся значение эталонного сигнала r(t) можно определить по теореме о конечном значении для преобразования Лапласа
|
r∞ = lim r(t) = lim s R(s) . |
|
|
t →∞ |
s→0 |
Например, если r(t) – единичный ступенчатый сигнал, для которого R(s) =1/ s , то r∞ =1. С другой стороны, для того, чтобы установившаяся ошибка была равна нулю, необходимо, чтобы предельное значение сигнала z(t) тоже было равно r∞ . Учитывая, что P(s) – устойчивая передаточная функция, имеем
r∞ = kP u∞ ,
где u∞ – нужное нам установившееся значение сигнала управления, а kP – статический коэф-
фициент усиления объекта, который вычисляется по формуле kP = lim P(s) (в среде MATLAB это
s→0
делает функция dcgain). Таким образом, в качестве эталонного сигнала управления можно
выбрать любой сигнал u0 (t) , у которого предельное значение при t → ∞ равно u∞ = r∞ , на- kP
пример, ступенчатый сигнал u0 (t) = u∞ (t > 0) , изображение которого равно U0 (s) = us∞ .
Теперь построим стандартную систему, соответствующую задаче оптимизации. Уравнения в изображениях имеют вид:
ε = Rw − Pu
kuεu = kuU0w − kuu y = r = Rw
Учитывая, что первые два уравнения определяют ошибки по выходу и по управлению, имеем
|
R |
− P |
, G21(s) = R и G22 (s) = 0 . |
|||||
|
G11 |
(s) = k U |
, G12 |
(s) = − k |
||||
|
u |
0 |
u |
6.5. Замкнутые системы
Теперь рассмотрим аналогичную задачу для замкнутой системы.
|
w = δ(t) |
R(s) |
r |
y |
u |
P(s) |
z |
ε |
|
C(s) |
Что изменилось с появлением замкнутого контура? Во-первых, уже не требуется, чтобы передаточные функции регулятора C(s) и объекта P(s) были устойчивыми. Во-вторых, требуется
обеспечить устойчивость замкнутой системы. В-третьих, поскольку P(s) может содержать множитель s в знаменателе (соответствующий интегрирующему звену), статический коэффи-
циент усиления kP = lim P(s) может оказаться равным бесконечности. Поэтому нужно скоррек-
s→0
тировать процедуру выбора эталонного управляющего сигнала.
56
|
© К.Ю. Поляков, 2009 |
||||||||
|
Передаточная функция от входа w к ошибке ε |
равна |
C |
||||||
|
C |
~ |
~ |
||||||
|
W (s) = 1 |
− |
P |
R = (1 −CP)R , где C(s) = |
, |
||||
|
1 +CP |
1 +CP |
|||||||
~
поэтому подынтегральное выражение в критерии качества будет зависеть от C(s) , а не от C(s) .
Чтобы обеспечить устойчивость получаемой оптимальной системы в общем случае нужно использовать параметризацию стабилизирующих регуляторов (см. аналогичную задачу при случайных возмущениях).
При определении эталонного сигнала управления вроде бы все осталось по-прежнему: по
|
теореме о предельном значении |
r∞ |
|||||||||||||
|
r = z |
∞ |
= lim s P(s) U |
0 |
(s) |
r |
= k |
P |
u |
∞ |
u |
∞ |
= |
. |
|
|
∞ |
s→0 |
∞ |
kP |
|||||||||||
Однако, проблема в том, что объект может содержать интегрирующие звенья, поэтому статиче-
ский коэффициент усиления kP = lim P(s) обращается в бесконечность. В этом случае эталон-
s→0
ный сигнал управления должен стремиться к нулю при t → ∞ . Например, можно принять u0 (t) = 0 при всех t .
Построим стандартную систему в задаче оптимизации по критерию
∞
I = ∫[ε2 (t) + ku2εu2 (t)]dt → min .
0
Уравнения системы имеют вид
ε = Rw − Pu
kuεu = kuU0w − kuu y = Rw − Pu
Учитывая, что первые два уравнения определяют ошибки по выходу и по управлению, имеем
|
G11 |
R |
, G12 |
− P |
, G21(s) = R |
и G22 (s) = −P . Как видим, все отличие от разомкну- |
|||
|
(s) = k U |
(s) = − k |
|||||||
|
u |
0 |
u |
той системы состоит в функции G22 (s) , которая в данном случае не равна нулю и представляет
собой передаточную функцию контура (без регулятора).
Можно показать, что устойчивые полюса передаточной функции объекта P(s) (и неус-
тойчивые полюса, «отраженные» от мнимой оси) становятся корнями характеристического уравнения оптимальной замкнутой системы. Вроде бы получается, что для объекта, включающего интегрирующее звено, задача не имеет решения. Однако из этого правила есть исключение: если модель входного сигнала R(s) также содержит интегрирующее звено (например, для
единичного ступенчатого сигнала R(s) =1/ s ), в ходе синтеза происходит сокращение двух
множителей и оптимальная система оказывается устойчивой.
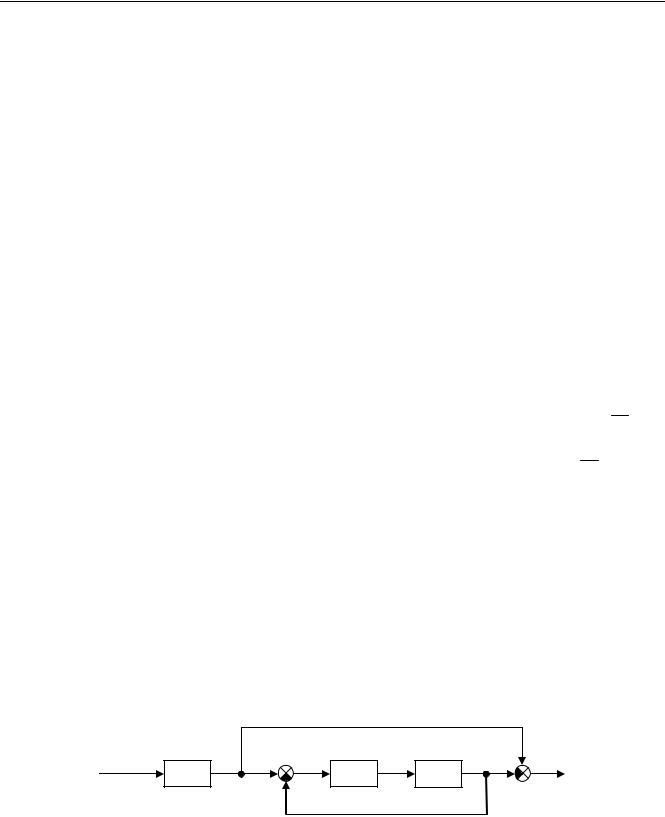
Если учитывать динамику привода и датчиков, схема немного усложняется:
|
w = δ(t) |
R(s) |
r |
y |
u |
z |
ε |
|
C(s) |
H (s) |
P(s) |
F(s)
В этом случае стандартная система описывается матрицами
|
R |
− PH |
, G21(s) = R и G22 (s) = −FPH . |
||||||
|
G11 |
(s) = k U |
, G12 |
(s) = |
−k |
||||
|
u |
0 |
u |
57

© К.Ю. Поляков, 2009
Заключение
Шаг за шагом, мы кратко рассмотрели основные понятия теории случайных процессов, а также принципы проектирования оптимальных линейных систем при случайных и детерминированных возмущениях.
Нужно понимать, что вы прочитали не учебник, а небольшое введение, призванное познакомить с основными идеями и дать общее представление о рассматриваемых вопросах. Тот, кто серьезно собирается изучать современные методы теории управления и использовать их в своей работе, должен продолжить изучение, взяв «нормальные» учебники (см. список литературы), в которых материал изложен значительно более строго и научно.
За рамками пособия остались многие родственные темы, с которыми должен быть знаком современный специалист по автоматическому управлению. Достаточно сказать, что мы рассмотрели только линейные непрерывные системы, тогда как практически все реальные системы содержат нелинейности и управляются цифровыми регуляторами, то есть являются непрерыв- но-дискретными. Ничего не было сказано о современных методах исследования многомерных систем (со многими входами и выходами) на основе моделей в пространстве состояний.
Автор будет считать свою задачу выполненной, если читатель почувствует в себе силы не остановиться на достигнутом и продолжить самообразование.
58

© К.Ю. Поляков, 2009
Литература для последующего чтения
(в порядке увеличения количества страниц)
1.Купер Дж., Макгиллем К. Вероятностные методы анализа сигналов и систем. М.: Мир, 1989.
2.Вентцель Е.С., Овчаров Л.А. Теория случайных процессов и ее инженерные приложения.
М.: Наука, 1991.
3.Мирошник И.В. Теория автоматического управления. Нелинейные и оптимальные системы
– СПб.: Питер, 2003.
4.Бендат Дж., Пирсол А. Прикладной анализ случайных данных – М.: Мир, 1989.
5.Первозванский А.А. Курс теории автоматического управления – М.: Наука, 1986.
6.Квакернак Х., Сиван Р. Линейные оптимальные системы управления / Пер с англ. – М.: Мир, 1977.
7.Гудвин Г.К., Гребе С.Ф., Сальгадо М.Э. Проектирование систем управления. М.: Бином, Лаборатория базовых знаний, 2004.
59
|
|

Макеты страниц
Основываясь на теореме Парсеваля, можно сформулировать задачу о выборе параметров из условия минимума интегральной квадратичной ошибки для произвольных входных сигналов. Задача минимизации распадается на четыре последовательных шага. Первый шаг состоит в определении изображения Фурье ошибки как функции комплексной переменной  Эта функция будет зависеть от параметров системы, которыми мы можем распоряжаться. Второй шаг состоит в выражении интегральной квадратичной ошибки
Эта функция будет зависеть от параметров системы, которыми мы можем распоряжаться. Второй шаг состоит в выражении интегральной квадратичной ошибки  в функции изображения ошибки
в функции изображения ошибки  на основании теоремы Парсеваля
на основании теоремы Парсеваля

При этом если  — дробно-рациональная функция, то
— дробно-рациональная функция, то  может быть представлена в виде
может быть представлена в виде

где  — полиномы от
— полиномы от  Третий шаг заключается в вычислении интеграла. К счастью, определенный интеграл (2.3-2) был вычислен как функция коэффициентов полиномов. Таблица этих интегралов вместе с описанием помещена в приложении V. После вычисления интеграла мы получаем интегральную квадратичную ошибку как функцию параметров
Третий шаг заключается в вычислении интеграла. К счастью, определенный интеграл (2.3-2) был вычислен как функция коэффициентов полиномов. Таблица этих интегралов вместе с описанием помещена в приложении V. После вычисления интеграла мы получаем интегральную квадратичную ошибку как функцию параметров  а именно
а именно

Четвертый шаг состоит в выборе значений параметров из условия минимума интегральной квадратичной ошибки. Формально это может быть сделано обычным методом, если приравнять частные производные  по параметрам нулю и решить полученную систему уравнений относительно значений параметров. Эта система из К уравнений имеет вид
по параметрам нулю и решить полученную систему уравнений относительно значений параметров. Эта система из К уравнений имеет вид

К сожалению, во многих практических задачах формальная процедура определения значений параметров, минимизирующих интегральную квадратичную ошибку, приводит к системе нелинейных уравнений, для которых не существует простых методов решения.
Если уравнения (2.3-3) достаточно сложны для решения аналитическими методами, то можно использовать численные методы или методы последовательных приближений. Однако когда для решения уравнений относительно параметров необходимы такие методы, то, вероятно, удобнее обратиться непосредственно к выражению интегральной квадратичной ошибки, изобразив ее как функцию одного параметра и считая остальные значения параметров фиксированными. Используя несколько совокупностей значений параметров и соответственно достаточное число кривых, можно определить значения всех параметров, обеспечивающих интегральную квадратичную ошибку, достаточно близкую, для практических целей, к ее минимальному значению. Непосредственное использование интегральной квадратичной ошибки позволяет избежать вычисления ее частных производных относительно параметров, которое может быть достаточно сложной и трудоемкой задачей. Процедуру отыскания минимума интегральной квадратичной ошибки можно пояснить на примере. Для иллюстрации рассмотрим расчет следящей системы по положению. В качестве входного сигнала возьмем ступенчатую функцию с высотой М. Задача
следящей системы состоит в том, чтобы сделать сигнал на выходе равным сигналу на входе. Следовательно, в этом случае желаемый сигнал на выходе совпадает с входным. В качестве заданного элемента системы выбран сервомотор, которому соответствует интегрирующее звено, соединенное последовательно с апериодическим. Физически это соответствует двигателю постоянного тока с регулированием в цепи якоря.
Если предположить, что напряжение на якоре пропорционально сигналу управления и пренебречь индуктивностью якоря, то постоянная времени  будет равна моменту инерции всей системы, приведенному к валу двигателя и деленному на коэффициент электрического демпфирования двигателя. Момент нагрузки и вязкое трение считаются достаточно малыми и не учитываются. Поскольку рассматривается следящая система по положению, то нужно считать передаточную функцию в цепи обратной связи равной единице.
будет равна моменту инерции всей системы, приведенному к валу двигателя и деленному на коэффициент электрического демпфирования двигателя. Момент нагрузки и вязкое трение считаются достаточно малыми и не учитываются. Поскольку рассматривается следящая система по положению, то нужно считать передаточную функцию в цепи обратной связи равной единице.
В качестве корректирующего элемента используем самый простой усилитель. Тогда единственным регулируемым параметром будет коэффициент усиления.
Для выбранной следящей системы необходимо определить интегральную квадратичную ошибку в функции коэффициента усиления и такое значение коэффициента, при котором эта ошибка минимальна. Если воспользоваться принятыми обозначениями, то задачу можно сформулировать следующим образом.
Дано. Сигнал на входе

Для желаемого выходного сигнала имеем

Передаточная функция неизменяемой части системы

Передаточная функция элемента в обратной связи

Передаточная функция корректирующего элемента

где  — коэффициент усиления системы по скорости. Этот коэффициент включает в себя коэффициент усиления неизменной части системы и коэффициент усиления звена коррекции.
— коэффициент усиления системы по скорости. Этот коэффициент включает в себя коэффициент усиления неизменной части системы и коэффициент усиления звена коррекции.
Необходимо определить. Вначале необходимо определить интегральную квадратичную ошибку как функцию  то есть
то есть  Затем необходимо определить такое значение
Затем необходимо определить такое значение  при котором ошибка минимальна.
при котором ошибка минимальна.
Решение. На основании рис. 2.1-2 можно записать следующее выражение для изображения ошибки:

На основании данных задачи для передаточной функции всей системы имеем

Изображение Фурье входного сигнала имеет вид

Соответственно изображение желаемого сигнала на выходе

Следовательно, можно записать изображение ошибки в виде

Согласно теореме Парсеваля, для интегральной квадратичной ошибки получим

где

и

Формула для  имеется в приложении V:
имеется в приложении V:

Подставляя значения коэффициентов из (2.3-15) и (2.3-16) в это выражение, получаем

или после деления на  имеем
имеем

Это дает первый искомый результат — величину интегральной квадратичной ошибки как функцию 
При определении значения  при котором интегральная квадратичная ошибка минимальна, необходимо вначале определить
при котором интегральная квадратичная ошибка минимальна, необходимо вначале определить
область значений  обеспечивающих устойчивость системы. Из (2.3-10) видно, что система устойчива для любых положительных значений и неустойчива для отрицательных значений
обеспечивающих устойчивость системы. Из (2.3-10) видно, что система устойчива для любых положительных значений и неустойчива для отрицательных значений  Согласно (2.3-18), можно заключить, что значение
Согласно (2.3-18), можно заключить, что значение  минимизирующее интегральную квадратичную ошибку, равно
минимизирующее интегральную квадратичную ошибку, равно  Это дает ответ на второй поставленный вопрос. Отметим, что если не принимать во внимание условия устойчивости, то можно получить нулевое значение интегральной квадратичной ошибки, положив
Это дает ответ на второй поставленный вопрос. Отметим, что если не принимать во внимание условия устойчивости, то можно получить нулевое значение интегральной квадратичной ошибки, положив  Это необходимо учитывать при определении значений параметров, минимизирующих интегральную квадратичную ошибку. Очевидно, приемлемыми значениями будут только те, при которых система устойчива. Из физических соображений ясно, что если значение параметра соответствует неустойчивой системе, то интегральная квадратичная ошибка обращается в бесконечность. Тот факт, что значение интегральной квадратичной ошибки (которая вычисляется на основании таблицы интегралов V.2-1 приложения V) конечно для значений параметров, соответствующих неустойчивости, можно объяснить условиями, использованными при выводе этих определенных интегралов. Эти условия сводятся к тому, что
Это необходимо учитывать при определении значений параметров, минимизирующих интегральную квадратичную ошибку. Очевидно, приемлемыми значениями будут только те, при которых система устойчива. Из физических соображений ясно, что если значение параметра соответствует неустойчивой системе, то интегральная квадратичная ошибка обращается в бесконечность. Тот факт, что значение интегральной квадратичной ошибки (которая вычисляется на основании таблицы интегралов V.2-1 приложения V) конечно для значений параметров, соответствующих неустойчивости, можно объяснить условиями, использованными при выводе этих определенных интегралов. Эти условия сводятся к тому, что  должна иметь все нули в левой полуплоскости. Для неустойчивой системы они, очевидно, не удовлетворяются и значение интегральной квадратичной ошибки, формально полученное при помощи таблицы интегралов, недействительно.
должна иметь все нули в левой полуплоскости. Для неустойчивой системы они, очевидно, не удовлетворяются и значение интегральной квадратичной ошибки, формально полученное при помощи таблицы интегралов, недействительно.
Рассмотрение этого примера подтвердит наше заключение о том, что коэффициент усиления системы для минимальной интегральной ошибки должен быть бесконечным. Коэффициент демпфирования системы второго порядка, определяемый (2.3-10), равен

а собственная частота

Если подставить эти параметры в (2.3-10), получим

Для ошибки, когда на входе действует единичная функция и желаемый сигнал совпадает с входным, имеем

Согласно (2.3-19), коэффициент демпфирования убывает при увеличении коэффициента усиления и поэтому является несколько неожиданным, что интегральная квадратичная ошибка убывает с увеличением коэффициента усиления. Однако если записать выражение для ошибки как функцию параметров  то получим
то получим

Это выражение показывает, что «огибающая» ошибки имеет затухание, определяемое только постоянной времени двигателя  и не зависящее от усиления
и не зависящее от усиления  Следовательно, при увеличении усиления
Следовательно, при увеличении усиления  функция
функция  носит все более колебательный характер, при этом ее огибающая в первом приближении не изменяется, как показано на рис. 2.3-1. Это объясняет тот факт, что интегральная квадратичная ошибка остается всегда конечной, независимо от того, насколько велик коэффициент усиления.
носит все более колебательный характер, при этом ее огибающая в первом приближении не изменяется, как показано на рис. 2.3-1. Это объясняет тот факт, что интегральная квадратичная ошибка остается всегда конечной, независимо от того, насколько велик коэффициент усиления.
Для малых коэффициентов усиления значения огибающей будут несколько больше, чем для больших из-за наличия квадратного, корня в знаменателе (2.3-23). В связи с этим следует ожидать увеличения интегральной квадратичной ошибки при уменьшении коэффициента усиления.
С другой стороны, для очень больших значений усиления огибающая в (2.3-23) практически не зависит от  однако число колебаний, заключенных в этой огибающей, становится настолько большим, что на любом малом интервале времени колебания имеют практически синусоидальную форму. Среднее квадратичное значение синусоидального сигнала равно половине квадрата амплитуды. Это означает, что можно вычислять интегральное квадратичное значение ошибки для больших
однако число колебаний, заключенных в этой огибающей, становится настолько большим, что на любом малом интервале времени колебания имеют практически синусоидальную форму. Среднее квадратичное значение синусоидального сигнала равно половине квадрата амплитуды. Это означает, что можно вычислять интегральное квадратичное значение ошибки для больших  как половину интегральной квадратичной, ошибки от огибающей, т. е.
как половину интегральной квадратичной, ошибки от огибающей, т. е.

или

После вычисления определенного интеграла получаем

Это значение можно также получить из (2.3-18) при 
В большинстве практических задач увеличение коэффициента усиления до бесконечности делает систему неустойчивой, при этом интегральная квадратичная ошибка обращается в бесконечность. Таким образом, результат рассмотренного примера является скорее необычным и его можно объяснить простотой элементов (см. (2.3-6)), составляющих неизменную часть системы.

Рис. 2.3-1. Ошибка в системе второго порядка при единичном ступенчатом воздействии: а) вход; б) ошибка при  ошибка при
ошибка при 
Такая идеализация в отношении заданных элементов в общем случае неприемлема при больших коэффициентах усиления. Один из путей ограничения диапазона изменения параметров так, чтобы идеализация заданных элементов системы была приемлемой, заключается в том, что задается собственная частота системы и после этого решается задача о выборе параметров из условия минимума интегральной квадратичной ошибки. Здесь следует считать, что постоянная времени двигателя и усиление по скорости  выбираются произвольно. Значение
выбираются произвольно. Значение  можно переписать как функцию коэффициента демпфирования и собственной частоты
можно переписать как функцию коэффициента демпфирования и собственной частоты

Легко видеть, что  достигает минимума при
достигает минимума при  Этот результат был впервые получен Холлом [21]. Значение коэффициента демпфирования, равное половине, является наиболее разумным для системы второго порядка.
Этот результат был впервые получен Холлом [21]. Значение коэффициента демпфирования, равное половине, является наиболее разумным для системы второго порядка.
Процедура минимизации интегральной квадратичной ошибки, рассмотренная выше и иллюстрированная примером, может применяться лишь в случае, когда изображение ошибки  является дробно-рациональной функцией. В противном случае этот метод приводит к серьезным затруднениям в расчете, в частности, если изображение ошибки является иррациональной функцией. Одним из возможных путей преодоления этих затруднений является аппроксимация функции времени так, чтобы изображение было дробно-рациональной функцией. Другой путь состоит в том, чтобы аппроксимировать изображение ошибки дробно-рациональной функцией. Наконец, третий путь заключается в том, чтобы производить все вычисления в области времени. Первые два пути очевидны, так как задача представляется в форме, рассмотренной выше. Третий путь будет кратко рассмотрен в следующем параграфе.
является дробно-рациональной функцией. В противном случае этот метод приводит к серьезным затруднениям в расчете, в частности, если изображение ошибки является иррациональной функцией. Одним из возможных путей преодоления этих затруднений является аппроксимация функции времени так, чтобы изображение было дробно-рациональной функцией. Другой путь состоит в том, чтобы аппроксимировать изображение ошибки дробно-рациональной функцией. Наконец, третий путь заключается в том, чтобы производить все вычисления в области времени. Первые два пути очевидны, так как задача представляется в форме, рассмотренной выше. Третий путь будет кратко рассмотрен в следующем параграфе.
Оглавление
- ОТ РЕДАКТОРА РУССКОГО ПЕРЕВОДА
- ПРЕДИСЛОВИЕ
- ГЛАВА 1. ИСКУССТВО РЕГУЛИРОВАНИЯ
- § 1.1. Регулирование по принципу обратной связи
- § 1.2. Ранняя история
- § 1.3. Математические модели; принцип суперпозиции
- § 1.4. Схемы и обозначения
- § 1.5. Задача регулирования
- § 1.6. Аналитический метод и метод проб
- § 1.7. Сравнение схемы последовательного соединения и схемы с обратной связью. Учет возмущений
- ГЛАВА 2. ВЫБОР ПАРАМЕТРОВ ИЗ УСЛОВИЯ МИНИМУМА ИНТЕГРАЛЬНОЙ КВАДРАТИЧНОЙ ОШИБКИ
- § 2.2. Теорема Парсеваля
- § 2.3. Минимизация интегральной квадратичной ошибки. Пример
- § 2.4. Выражение интегральной квадратичной ошибки через передающую функцию
- § 2.5. Нормировка
- § 2.6. Учет ограничений
- § 2.7. Примеры учета ограничений
- § 2.8. Заключение
- ГЛАВА 3. СТОХАСТИЧЕСКИЕ СИГНАЛЫ
- § 3.1 Стохастические процессы; характеристики стохастических сигналов
- § 3.2. Функции плотности вероятности; эргодическая гипотеза
- § 3.3. Корреляционные функции; методы определения
- § 3.4. Пример получения корреляционной функции из теоретических соображений
- § 3.5. Распределение Пуассона
- § 3.6. Другой пример получения корреляционной функции
- § 3.7. Теорема Кемпбелла
- § 3.8. Заключение
- ГЛАВА 4. ВЫБОР ПАРАМЕТРОВ, МИНИМИЗИРУЮЩИХ СРЕДНЕКВАДРАТИЧНУЮ ОШИБКУ
- § 4.1. Реакция линейной системы на стохастический входной сигнал
- § 4.2. Спектральная плотность; соотношения в линейных системах
- § 4.3. Дополнительные соотношения между функциями спектральных плотностей
- § 4.4. Формула среднего квадрата ошибки; процедура минимизации
- § 4.5. Пример
- § 4.6. Нормировка функции спектральной плотности
- § 4.7. Введение дополнительных условий. Пример
- § 4.8. Заключение
- ГЛАВА 5. МИНИМИЗАЦИЯ СРЕДНЕГО КВАДРАТА ОШИБКИ ПРИ ПРОИЗВОЛЬНОЙ СТРУКТУРНОЙ СХЕМЕ
- § 5.2. Интегральное уравнение для определения весовой функции
- § 5.3. Пример решения интегрального уравнения
- § 5.4. Точная формула для определения весовой функции
- § 5.5. Пример на применение полученной формулы
- § 5.6. Заключение
- ГЛАВА 6. МИНИМИЗАЦИЯ СРЕДНЕГО КВАДРАТА ОШИБКИ И ИНТЕГРАЛА ОТ КВАДРАТА ОШИБКИ ПРИ НЕПРОИЗВОЛЬНОЙ СТРУКТУРЕ СИСТЕМЫ
- § 6.1. Коррекция, обеспечивающая минимум среднего квадрата ошибки
- § 6.2. Минимально-фазовые и неминимально-фазовые системы
- § 6.3. Ограничения, связанные с заданной частью системы. Пример
- § 6.4. Коррекция, обеспечивающая минимум интеграла от квадрата ошибки. Пример
- § 6.5. Метод расчета при неустойчивых заданных элементах
- § 6.6. Общие замечания о пределе качества, достижимого в линейных системах
- ГЛАВА 7. ОГРАНИЧЕНИЕ ТЕНДЕНЦИИ К НАСЫЩЕНИЮ В ЗАДАННЫХ ЭЛЕМЕНТАХ СИСТЕМЫ
- § 7.2. Соотношение между вероятностью насыщения и с.к.з. предельной амплитуды
- § 7.3. Задача минимизации при учете насыщения в системах с частично заданной структурной схемой
- § 7.4. Примеры
- § 7.5. Заключение
- ГЛАВА 8. РАСЧЕТ СИСТЕМЫ РЕГУЛИРОВАНИЯ С МИНИМАЛЬНОЙ ПОЛОСОЙ ПРОПУСКАНИЯ
- § 8.2. Определение полосы пропускания из экспериментальных соображений
- § 8.3. Постановка задачи
- § 8.4. Определение весовой функции системы с минимальной полосой при учете ограничений показателей качества
- § 8.5. Примеры, иллюстрирующие метод
- § 8.6. Заключение
- ГЛАВА 9. ПРИМЕНЕНИЕ АНАЛИТИЧЕСКОГО МЕТОДА К ПРАКТИЧЕСКИМ ЗАДАЧАМ
- § 9.1. Как аналитический метод применяется к практическим задачам
- § 9.2. Задача расчета привода по азимуту для радиотелескопа
- § 9.3. Схема следящей системы по азимуту
- § 9.4. Оценка разброса, связанного с моментом от ветра
- § 9.5. Ошибка от порывов ветра в системе с дополнительными ограничениями
- § 9.6. Ошибка от порывов ветра при ограничении полосы пропускания
- § 9.7. Расчет методом проб
- § 9.8. Заключение
- ПРИЛОЖЕНИЕ I. ПРЕОБРАЗОВАНИЯ ФУРЬЕ И ЛАПЛАСА
- 1. Преобразование Фурье; вводные замечания
- 2. Переход к преобразованию Лапласа
- 3. Некоторые свойства преобразований Лапласа и Фурье
- 4. Некоторые определения и соотношения из теории комплексного переменного
- 5. Обратное преобразование Фурье
- 6. Обратное преобразование Лапласа
- 7. Расширение класса преобразуемых по Фурье функций с помощью множителя сходимости
- ПРИЛОЖЕНИЕ II. КРИТЕРИИ УСТОЙЧИВОСТИ
- 2. Критерий устойчивости Найквиста
- 3. Критерий устойчивости Рауса — Гурвица
- 4. Сравнение двух критериев устойчивости
- ПРИЛОЖЕНИЕ III. ОБЗОР ТИПОВЫХ МЕТОДОВ РАСЧЕТА
- 2. Характеристики качества
- 3. Диаграммы Боде
- 4. Коррекция в обратной связи
- 5. Определение переходного процесса по частотной характеристике
- 6. Коэффициенты ошибок
- 7. Метод корневых годографов
- 8. Аналоговые модели
- ПРИЛОЖЕНИЕ IV. МЕТОД ПРОБ В ПЛОСКОСТИ УСИЛЕНИЕ — ФАЗА
- 2. Конкретный пример
- 3. Графики, используемые в расчете
- 4. Степень устойчивости
- 5. Выбор коэффициента усиления по заданной степени устойчивости
- 6. Определение частотной характеристики замкнутой системы
- 7. Запаздывающая коррекция
- 8. Опережающая коррекция
- 9. Общие замечания по рассмотренному примеру
- ПРИЛОЖЕНИЕ V. ТАБЛИЦА ИНТЕГРАЛОВ
- 2. Табулированные значения интеграла
- ПРИЛОЖЕНИЕ VI. АМПЛИТУДНО-ФАЗОВЫЕ СООТНОШЕНИЯ ДЛЯ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ МИНИМАЛЬНО-ФАЗОВЫХ СИСТЕМ
- 2. Аппроксимация фазовой характеристики, соответствующей заданной амплитудной характеристике
- ЗАДАЧИ
- ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
- ЛИТЕРАТУРА
Портал ТОЭ
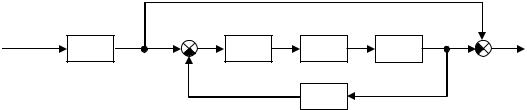
6.2 Классический метод расчёта переходных процессов
Анализ переходного процесса в линейной цепи с сосредоточенными параметрами R , L , C (рис. 6.2 ) сводится к решению линейных неоднородных уравнений, выражающих законы Кирхгофа.
где i ( t ) – переходный ток.
Дифференцированием приводим это уравнение к неоднородному дифференциальному уравнению 2-го порядка:
Порядок дифференциального уравнения определяется числом накопителей энергии в цепи.
Решение дифференциального уравнения:
где i пр ( t ) – частное решение неоднородного уравнения, принуждённая составляющая, ток в установившемся режиме, когда переходный процесс закончен (при t = ∞ );
i св ( t ) – общее решение однородного уравнения, свободная составляющая, ток во время переходного процесса, возникающий вследствие изменения электрических и магнитных полей.
Таким образом здесь используется метод наложения. Физически существует только i ( t ) , а разложение его на i пр и i св является математическим приёмом, облегчающим расчёт переходного процесса.
Расчёт принуждённой составляющей сводится к расчёту по известным методам установившегося значения искомой величины в схеме после коммутации.
Для расчёта свободной составляющей следует найти корни характеристического уравнения p k и n постоянных интегрирования A k .
Если характеристическое уравнение
имеет n различных корней p k ( k = 1 , 2 , … ,n ) , то
Корню p k кратности m k ≥ 1 соответствует слагаемое свободной составляющей вида
Чтобы определить постоянные интегрирования A k , необходимо знать значения искомой величины и всех её производных до ( n − 1) порядка включительно в момент времени t = 0+ . Для их определения используются законы коммутации.
Составление характеристического уравнения
- Составляем уравнение электрического состояния цепи для свободного режима (т.е. при устранении вынужденной (принуждающей) силы). Это соответствует схеме с исключёнными источниками – источники ЭДС закорачиваются, ветви с источниками тока размыкаются.
Например для рис. 6.3 :
где Z вх ( p ) – входное сопротивление схемы относительно двух зажимов, получающихся в результате размыкания любой ветви схемы;
Y вх ( p ) – входная проводимость схемы относительно произвольной пары узлов схемы.
Корни характеристического уравнения – собственные частоты цепи, т.к. они определяют характер свободных процессов.
Степень характеристического уравнения может быть определена по электрической схеме без составления уравнения: она равна числу основных независимых начальных условий в послекоммутационной схеме после максимального её упрощения и не зависит от числа ЭДС в схеме.
Упрощение заключается в том, что последовательно и параллельно соединённые реактивные элементы должны быть заменены эквивалентными.
Рассмотрим схему на рис. 6.4 . Три реактивных элемента в упрощённой схеме определяют три независимых начальных условия, т.е. порядок характеристического уравнения равен трём.
Свободный процесс происходит в цепи, освобождённой от источников энергии, поэтому свободные токи не могут протекать сколь угодно долго в цепи, где есть активные элементы. Свободные токи должны затухать, в связи с этим действительные части корней p k характеристического уравнения должны быть отрицательными.
- Так, при наличии одного корня p = − a
5.7 Свойства корней характеристического уравнения
Свободный процесс происходит в цепи, освобожденной от источников электрической энергии. Он описывается слагаемыми вида Аe pt .
В цепи, освобожденной от источников, свободные токи не могут протекать сколь угодно долго, так как энергия в цепи расходуется на тепловые потери. Таким образом, свободные токи должны затухать. Следовательно, действительная часть корней характеристического уравнения должна быть отрицательной.
Уравнение первой степени всегда имеет один отрицательный вещественный корень. Уравнение второй степени может иметь: два действительных неравных отрицательных корня; два действительных отрицательных равных корня; два комплексно-сопряженных корня с отрицательной действительной частью.
Уравнение третьей степени может иметь: три действительных отрицательных неравных корня; три действительных отрицательных корня, из которых два равны друг другу; три действительных отрицательных равных корня; один действительный отрицательный корень и два комплексно-сопряженных корня с отрицательной действительной частью.
Рассмотрим характер свободного процесса для простейших переходных процессов в цепях первого и второго порядков.
При одном корне.
Свободный ток iсв=Аe pt , где p=-α зависит только от параметров цепи; A – от параметров цепи, ЭДС и момента включения (коммутации).
0 график свободного тока имеет вид, показанный на рисунке 5.4.>

За время t=τ=1/α функция Аe -αt уменьшается в е=2,71 раза; 

называют постоянной времени переходного процесса. Она зависит от структуры цепи и ее параметров. При двух действительных неравных корнях.


Рисунок 5.5 – Графики свободной составляющей переходного тока
На рисунке 5.5 показаны графики свободной составляющей переходного тока при различных соотношениях постоянных интегрирования А1 и А2.
При двух комплексно-сопряженных корнях.
Если 
В этом случае свободный ток описывается выражением

Формула описывает затухающее синусоидальное колебание с угловой частотой ω0 и начальной фазой γ(рис.5.6). ω0 и δ зависят только от параметров цепи после коммутации, а А и γ – от параметров, ЭДС и начальных условий.

Рисунок 5.6 – Характер изменения свободной составляющей переходного тока при комплексно-сопряженных корнях характеристического уравнения
корней характеристического уравнения
Одним из косвенных показателей качества систем управления является степень удаленности корней характеристического уравнения замкнутой САУ от мнимой оси комплексной плоскости. Пусть ближайшие к мнимой оси комплексно-сопряженные корни устойчивой системы имеют значение
 . (7.1)
. (7.1)
Расстояние  (рис. 8.2) ближайших к мнимой оси комплексно-сопряженных корней называется степенью устойчивости системы.
(рис. 8.2) ближайших к мнимой оси комплексно-сопряженных корней называется степенью устойчивости системы.
Угол φ, образуемый лучами, проведенными из начала координат через эти корни, характеризует колебательность системы. Степенью колебательности системы (коэффициентом затухания колебаний) называют количественную характеристику, определяемую выражением
 . (7.2)
. (7.2)
Чтобы система обладала заданной колебательностью, все корни характеристического уравнения должны вписываться в угол 2φ (см. рис. 7.2). Для большинства систем управления допустимое перерегулирование  не должно превышать (10…20)%, что соответствует m=0,2…0,5.
не должно превышать (10…20)%, что соответствует m=0,2…0,5.

Рис. 7.2. Область расположения корней
с заданными показателями и 
При корневых методах оценки качества системы, т. е. по расположению корней характеристического полинома, исходят из следующих соображений.
Решение однородного уравнения, характеризующего свободное движение системы, представляет собой сумму затухающих экспонент вида (6.2). Полагая, что качество САУ в основном определяется ближайшим к мнимой оси вещественным корнем или ближайшей к мнимой оси парой комплексно-сопряженных корней (доминирующих корней), можно записать
 .
.
Полагая, что зона δ установления переходного процесса составляет (2…5)% от установившегося значения  , можно найти требуемое соотношение степени устойчивости системы и времени регулирования tр:
, можно найти требуемое соотношение степени устойчивости системы и времени регулирования tр:
 . (7.3)
. (7.3)
Следовательно, задаваясь временем регулирования, можно рассчитать минимальное (по модулю) значение вещественных частей корней характеристического уравнения.
Аналогично можно связать степень колебательности m системы со степенью затухания колебаний. Пусть по условиям технологии требуется, чтобы каждая последующая амплитуда колебаний затухала в k раз по сравнению с предыдущей. Тогда
 . (7.4)
. (7.4)
Пусть k=10, тогда в соответствие с (7.4) получим m=0,336 и
 .
.
Таким образом, задаваясь временем регулирования  и соотношением амплитуд колебаний k, можно определить допустимую область расположения корней на комплексной плоскости или решить обратную задачу расчета параметров и k переходного процесса по расположению доминирующих корней характеристического уравнения. Следует отметить, что данный подход дает приемлемую точность оценки качества регулирования, если действительные части остальных корней характеристического уравнения больше действительной части доминирующих корней, по крайней мере, в 5 раз [6].
и соотношением амплитуд колебаний k, можно определить допустимую область расположения корней на комплексной плоскости или решить обратную задачу расчета параметров и k переходного процесса по расположению доминирующих корней характеристического уравнения. Следует отметить, что данный подход дает приемлемую точность оценки качества регулирования, если действительные части остальных корней характеристического уравнения больше действительной части доминирующих корней, по крайней мере, в 5 раз [6].
Для построения в плоскости параметров областей, обеспечивающих требуемые показатели качества регулирования целесообразно использовать метод D-разбиения [6]. В качестве примера используем уравнение Вышнеградского, описывающего в параметрической форме характеристический полином 3-го порядка,
 . (7.5)
. (7.5)
где A и B – обобщенные параметры характеристического уравнения.
Подставим выражение для комплексного корня  в (7.5). Тогда получим
в (7.5). Тогда получим
 .
.
Приравнивая нулю вещественную и мнимую части, получим
 ,
,  (7.6)
(7.6)
Полагая  в (7.6), получим границу области устойчивости системы в параметрической форме
в (7.6), получим границу области устойчивости системы в параметрической форме
 (7.7)
(7.7)
 — уравнение гиперболы Вышнеградского (кривая 1, рис. 7.3).
— уравнение гиперболы Вышнеградского (кривая 1, рис. 7.3).

Рис. 7.3. Границы областей устойчивости,
колебательности и апериодичности на
Полагая  в (7.6), получим границу области апериодичности системы в параметрической форме (кривые 2 и 3 на рис. 7.3)
в (7.6), получим границу области апериодичности системы в параметрической форме (кривые 2 и 3 на рис. 7.3)
 .
.
Поскольку на кривой 1 ω ≠ 0, а на кривых 2 и 3 ω = 0, то области I и III являются областями комплексных, а область II – вещественных корней (см. рис. 7.3). Следовательно, если параметры A, B принадлежат области II, то переходные процессы имеют апериодический характер, причем, чем эти параметры больше, тем процессы более затянуты. Если параметры принадлежат области I, то переходные процессы имеют колебательный характер, причем, чем больше A и меньше B, тем выше колебательность. Область III является областью монотонности решения однородного дифференциального уравнения, соответствующего (7.5), а, следовательно, переходные процессы, имея колебательный характер, тем не менее, затухают монотонно (без перерегулирования).
Диаграмма Вышнеградского [19] помимо приведенных кривых содержит кривые равных вещественных частей комплексных корней (равной степени устойчивости), причем для двух случаев расположения корней, когда ближайшими к мнимой оси являются комплексные корни и, когда ближайшим к мнимой оси расположен вещественный корень (на рис. 7.3 эти кривые не показаны). В частности, на границе областей I и III (кривая 4) все три корня равно удалены от мнимой оси.
Требования повысить быстродействие и одновременно снизить перерегулирование в системе являются противоречивыми друг другу, что заставляет искать компромисс. В общем случае, с точки зрения переходного процесса наилучшей считается САУ, у которой все корни характеристического уравнения n-го порядка равны друг другу (на практике редко реализуется), т. е.
 , i=1, 2, 3…n.
, i=1, 2, 3…n.
В этом случае перерегулирование не превышает 10%, а время нарастания регулирования является минимальным.
Если все корни являются вещественными, то система характеризуется отсутствием перерегулирования, т. е. апериодическими переходными процессами. Время регулирования будет тем меньше, чем меньше среднегеометрический корень  или, иначе, чем ближе к мнимой оси расположен центр корней.
или, иначе, чем ближе к мнимой оси расположен центр корней.
При анализе качества системы корневыми методами необходимо учитывать влияние нулей передаточной функции на переходный процесс.
Прежде всего, нужно проверить, насколько близки нули к полюсам.
Если нуль и полюс совпадают, то их нужно сократить, и они не будут влиять на качество системы. Порядок системы при этом, естественно, будет понижен.
Если полюсы и нули передаточной функции не совпадают, то полюсы определяют отдельные составляющие переходного процесса (апериодические и гармонические), а нули определяют удельный вес каждой из этих составляющих. Чем ближе нуль передаточной функции расположен к какому-либо полюсу, тем меньше его вклад в переходную характеристику составляющей, соответствующей данному полюсу.
7.2.2. Интегральные оценки качества
В основе интегральных оценок качества лежит предположение, что качество регулирования тем выше, чем меньше площадь между кривой переходного процесса и заданным значением регулируемой переменной. Интегральные оценки качества являются строгой математической формулировкой понятия качества системы, и их минимизация позволяет определить оптимальные параметры системы управления, т. е. решить задачу параметрического синтеза системы. Для этой цели применяются процедуры безусловной и условной оптимизации [2, 6, 10-12, 19-21].
Наибольшее применение для косвенной оценки качества САУ находят интегральные оценки вида [6, 11, 12, 19]:
 ; (7.8)
; (7.8)
 ; (7.9)
; (7.9)
 ; (7.10)
; (7.10)
 ; (7.11)
; (7.11)
 , (7.12)
, (7.12)
где  — текущая ошибка регулирования, являющаяся функцией времени,
— текущая ошибка регулирования, являющаяся функцией времени,
С – некоторый весовой коэффициент, характеризующий допустимую скорость изменения ошибки регулирования, а, следовательно, выходной координаты в переходном процессе.
В критерии (7.8) подынтегральное выражение линейно относительно ошибки регулирования и такая оценка применяется только для апериодического переходного процесса, когда ошибка имеет положительный знак.
Интегральная квадратичная оценка (ИКО) вида (7.9) применяется при колебательном характере переходных процессов, характеризующихся сменой знака ошибки регулирования. Интегральная квадратичная оценка (7.10) применяется в тех случаях, когда требуется учитывать ограничения энергии управления.
Широко используемым видом оценки качества является интеграл от модуля ошибки (ИМО) – (7.11), позволяющем учесть смену знака подынтегральной функции.
Чтобы уменьшить вклад начальной ошибки в интеграл (7.11) и учесть связанную с этим ошибку была предложена [6] оценка в виде интеграла от взвешенного модуля ошибки (ИВМО) в виде (7.12).
Рассмотрим пример. Пусть передаточная функция замкнутой системы 2-го порядка имеет вид:
 , (7.13)
, (7.13)
где  — коэффициент затухания.
— коэффициент затухания.
Нормированное значение собственной частоты принято  . На рис. 7.4 приведены кривые, отражающие изменение двух из приведенных выше интегральных оценок системы (ИКО и ИВМО) в функции коэффициента затухания [6].
. На рис. 7.4 приведены кривые, отражающие изменение двух из приведенных выше интегральных оценок системы (ИКО и ИВМО) в функции коэффициента затухания [6].

Рис. 7.4. Интегральные оценки
качества системы второго порядка
Как видим, оценка ИВМО по сравнению с ИКО имеет ярко выраженный минимум (хорошую избирательность), соответствующий = 0,707, что для данной системы 2-го порядка обеспечивает наиболее быстрое протекание переходного процесса с перерегулированием около 4,3%.
Рассмотрим еще один пример. Пусть передаточная функция замкнутой системы имеет достаточно общий вид нерекурсивного фильтра n-го порядка:
 . (7.14)
. (7.14)
Безусловная оптимизация систем первого-четвертого порядка (n=1…4), описываемых передаточными функциями (7.14), по критерию ИВМО дает оптимальные значения коэффициентов полиномов знаменателей этих передаточных функций, приведенные в табл. 7.1. Значения коэффициентов нормированы относительно собственной частоты колебаний  .
.
На рис. 7.5 приведены кривые переходных процессов, соответствующих оптимальным по критерию ИВМО фильтрам первого-четвертого порядка.
Значения коэффициентов нормированы относительно собственной частоты колебаний . На рис. 7.5 приведены кривые переходных процессов, соответствующие оптимизации фильтров первого-четвертого порядка по критерию ИВМО.

Рис. 7.5. Переходные характеристики, соответствующие
оптимизации систем по ИВМО
Графики построены в зависимости от нормированного времени  .
.
Кроме приведенных оценок для оптимизации систем управления применяются и другие интегральные критерии качества, в частности, лежащие в основе синтеза фильтров Баттерворта, широко применяемых при настройке контуров электромеханических систем управления.
8. Метод пространства состояний
Широкое распространение компьютеров и мощных систем программирования побуждает к исследованию САУ во временной области, а, следовательно, к непосредственному использованию описания динамических систем управления в форме обыкновенных дифференциальных уравнений без перехода к операторной форме. Кроме того, как уже отмечалось, векторно-матричные формы описания и исследования применимы не только к одномерным, линейным, стационарным САУ, но и к широкому классу многомерных, нелинейных и нестационарных САУ.
Чтобы получить пригодную для компьютерного синтеза и анализа модель САУ, необходимо представить ее в переменных состояния системы, используя далеко не единственный набор переменных. Следует отметить, что описание систем во временной области в векторно-матричной форме лежит в основе современной теории управления и оптимизации. В настоящей главе рассмотрены вопросы применения метода пространства состояния к непрерывным системам управления.
8.1. Векторно-матричное описание САУ
Состояние системы – это совокупность значений переменных системы (координат состояния), существенных с точки зрения решаемой задачи. В общем случае, в это число включают не только выходные и внутренние переменные САУ, но и задающие воздействия, и доминирующие возмущающие воздействия внешней среды. Чем полнее достоверной информации о состоянии системы в текущий момент времени, тем проще определить будущие значения всех ее переменных. Инженерно-технический персонал, разрабатывающий и эксплуатирующий технические системы управления, оперирует, как правило, с такими физическими переменными, которые могут быть измерены с помощью соответствующих датчиков. К таким физическим переменным САУ относят ускорение, скорость, перемещение, давление, расход, температуру, уровень и т. п. Координатами датчиков технологических координат САУ являются другие переменные — напряжение, ток, частота следования импульсов, двоичный код и т. п., что дает исследователю возможность выбора для синтеза и анализа необходимого набора координат состояния САУ.
Векторно-матричная модель многомерной, нелинейной, нестационарной САУ записывается в виде [6, 10, 11, 19]

 ,
,
 , (8.1)
, (8.1)
где X(t), U(t),F(t), Y(t) – соответственно векторы состояния, управления, возмущения и выходных (управляемых) координат системы,
 – вектор первых производных координат состояния,
– вектор первых производных координат состояния,
 – нелинейные, нестационарные функции координат состояния, управления и возмущения системы.
– нелинейные, нестационарные функции координат состояния, управления и возмущения системы.
В уравнении (8.1) вектор управления U(t) является, в общем случае, некоторой нелинейной нестационарной функцией задающих координат, координат состояния и возмущения САУ и призван обеспечить оптимальное управление системой. Описание многомерных, нелинейных, нестационарных САУ в форме (8.1) не позволяет, как правило, получить инженерное решение задачи структурно-параметрического синтеза оптимального управления U(t) или такое решение приводит к неоправданным затратам на реализацию (в техническом или экономическом аспектах). В большинстве случаев такие модели сводят к одномерным или многомерным линейным (линеаризованным) квазистационарным моделям, для которых имеются развитые методы и инженерные методики синтеза оптимального управления.
Линейную (линеаризованную) модель многомерной стационарной (квазистационарной) САУ представляют в виде системы обыкновенных дифференциальных уравнений первого порядка в форме Коши:

 ,
,
 , (8.2)
, (8.2)
 .
.
Эту же систему дифференциальных уравнений можно представить в векторно-матричной форме [6, 11, 19]:
 , (8.3)
, (8.3)
где  — векторы (векторы-столбцы) соответственно состояния и управления САУ,
— векторы (векторы-столбцы) соответственно состояния и управления САУ,
 ,
,  ;
;
 — символ транспонирования (иногда для обозначения транспонирования применяют буквенный символ “т”);
— символ транспонирования (иногда для обозначения транспонирования применяют буквенный символ “т”);
 — стационарные матрицы соответственно состояния и управления,
— стационарные матрицы соответственно состояния и управления,
 ,
,  .
.
В общем случае, на объект управления помимо управляющих воздействий действуют возмущающие воздействия. В этом случае векторно-матричную модель системы представляют в виде
 , (8.4)
, (8.4)
где  — вектор-столбец возмущающих воздействий САУ, C – стационарная матрица возмущений,
— вектор-столбец возмущающих воздействий САУ, C – стационарная матрица возмущений,
 ,
,
 .
.
Выходные (управляемые) переменные не всегда непосредственно принадлежат вектору состояния. В линейных САУ они линейно связаны с переменными состояния, управляющими и возмущающими переменными. В этом случае к уравнениям (8.3), (8.4) присоединяют алгебраические линейные уравнения
 (8.5)
(8.5)
или  , (8.6)
, (8.6)
где  — вектор выходных переменных САУ,
— вектор выходных переменных САУ,  ;
;
K, L, M – стационарные матрицы соответственно размерностей (r  n), (r m), (r d).
n), (r m), (r d).
Следует отметить, что приведенные уравнения (8.1)…(8.6) дают описание лишь объекта управления или разомкнутой системы, если вектор управления U(t) не является функцией координат состояния САУ. В замкнутых линейных САУ управление обычно формируют как линейную форму координат состояния и, в общем случае, возмущения САУ.
В качестве примера приведем векторно-матричное описание ранее рассматриваемого электродвигателя постоянного тока как объекта регулирования по цепи якоря. Пусть выходной (регулируемой) координатой является скорость вращения двигателя. Полагая, что напряжение возбуждения  , а магнитный поток
, а магнитный поток  , математическую модель электродвигателя можно представить в виде:
, математическую модель электродвигателя можно представить в виде:

 ,
,
 . (8.7)
. (8.7)
Воспользуемся векторно-матричной моделью линейных САУ в виде (8.4), (8.5). Зададимся векторами состояния, управления и возмущения в виде:

 ;
;  ;
;
 (8.8)
(8.8)
По уравнениям (8.7) найдем матрицы состояния, управления и возмущения:

 ;
;  ;
;  . (8.9)
. (8.9)
Поскольку выходная переменная всего одна и ей является координата состояния  , уравнение выхода преобразуется к скалярной форме
, уравнение выхода преобразуется к скалярной форме
 . (8.10)
. (8.10)
По описанию системы в форме векторно-матричных уравнений (ВМУ) можно непосредственно получить эквивалентную передаточную функцию (ПФ) и, наоборот, зная ВМУ системы, можно получить ее ПФ. Для этого в системе MATLAB имеется две функции: функция tf и функция ss.
Пусть ВМУ системы имеет вид (8.3), (8.5). Применительно к системе MATLAB ВМУ записывают в виде



Для получения ВМУ в системе MATLAB необходимо определить функцию ss(A,B,C,D). Для преобразования ВМУ к ПФ системы необходимо записать:
sys_ss=ss(A,B,C,D); % Формирование ВМУ системы;
sys_tf=tf(sys_ss), % Преобразование ВМУ к ПФ системы.
Для обратного преобразования ПФ к ВМУ необходимо записать:
sys_tf=tf(num,den); % Формирование ПФ системы;
sys_ss=ss(sys_tf); Преобразование ПФ к ВМУ системы.
Рассмотрим пример. Пусть ПФ системы имеет вид
 .
.
Тогда запишем скрипт преобразования ПФ к ВМУ и обратного преобразования ВМУ к ПФ:
sys_tf=tf(num,den); % Формирование ПФ системы;
sys_ss=ss(sys_tf); %Преобразование ПФ к ВМУ системы;
источники:
http://chertovlektor.ru/toe/perehodnie-processi-v-lineinih-elektricheskih-cepyah/svoistva-kornei-harakteristicheskogo-uravneniya
http://poisk-ru.ru/s49289t1.html