Improve Article
Save Article
Improve Article
Save Article
Signals in computers are a way of communication between the process and the OS. When a running program undergoes some serious error then the OS sends a signal to the process and the process further may not execute. Some processes may have a signal handler that does some important tasks before the process leaves the CPU.
Signal and interrupt are basically the same but a small distinction exists i.e interrupts are generated by the processor and handled by the kernel but signals are generated by the kernel and handled by the process. Error signals generally cause termination of the program and a core dump file is created named core, which stores the state of the process at the moment of termination. This file can be investigated using the debugger to know the cause of program termination.
Error signals:
- SIGFPE –
This error signal denotes some arithmetic error that occurred like division by zero, or floating-point error. If a program stores integer data in a location that is then used as a floating-point operation, this causes an “invalid operation” exception as the processor cannot recognize the data as a floating-point value. But this signal does not specify the type of floating-point error.
- SIGILL –
This signal denotes illegal instruction. When a garbage instruction or instruction that a program has no privilege to execute, is executed then this signal is generated. C does not produce illegal instruction so there is no chance of facing such an error signal, as the probable cause may be that the object file may be corrupted. This signal is also generated when a stack overflow occurs.
- SIGSEGV –
The signal is generated when a process tries to access a memory location not allocated to it, like de-referencing a wild pointer which leads to a “segmentation fault”. The signal is only generated when a program goes far from its memory space so that it can be detected by the memory protection mechanism.
The name is an abbreviation for “segmentation violation”. - SIGBUS –
The name is an abbreviation for “Bus error”. This signal is also produced when an invalid memory is accessed. It may seem to be the same as SIGSEGV but in SIGSEGV, the memory location referenced is valid but in the case of SIGBUS, memory referenced does not exist i.e de-referencing a memory location out of memory space.
- SIGABRT –
If an error itself is detected by the program then this signal is generated using call to abort(). This signal is also used by the standard library to report an internal error. assert() function in c++ also uses abort() to generate this signal.
C++
#include <iostream>
using namespace std;
int main() {
int arr[5] = {1, 2, 3, 4, 5};
arr[6] = 6;
return 0;
}
Output:
Abort signal from abort(3) (SIGABRT)
- SIGSYS –
This signal is sent to process when an invalid argument is passed to a system call.
- SIGTRAP –
This signal is sent to process when an exception has occurred. This is requested by the debugger to get informed. For example, if a variable changes its value then this will trigger it.
Refer for – Segmentation Fault (SIGSEGV) vs Bus Error (SIGBUS)
Improve Article
Save Article
Improve Article
Save Article
Signals in computers are a way of communication between the process and the OS. When a running program undergoes some serious error then the OS sends a signal to the process and the process further may not execute. Some processes may have a signal handler that does some important tasks before the process leaves the CPU.
Signal and interrupt are basically the same but a small distinction exists i.e interrupts are generated by the processor and handled by the kernel but signals are generated by the kernel and handled by the process. Error signals generally cause termination of the program and a core dump file is created named core, which stores the state of the process at the moment of termination. This file can be investigated using the debugger to know the cause of program termination.
Error signals:
- SIGFPE –
This error signal denotes some arithmetic error that occurred like division by zero, or floating-point error. If a program stores integer data in a location that is then used as a floating-point operation, this causes an “invalid operation” exception as the processor cannot recognize the data as a floating-point value. But this signal does not specify the type of floating-point error.
- SIGILL –
This signal denotes illegal instruction. When a garbage instruction or instruction that a program has no privilege to execute, is executed then this signal is generated. C does not produce illegal instruction so there is no chance of facing such an error signal, as the probable cause may be that the object file may be corrupted. This signal is also generated when a stack overflow occurs.
- SIGSEGV –
The signal is generated when a process tries to access a memory location not allocated to it, like de-referencing a wild pointer which leads to a “segmentation fault”. The signal is only generated when a program goes far from its memory space so that it can be detected by the memory protection mechanism.
The name is an abbreviation for “segmentation violation”. - SIGBUS –
The name is an abbreviation for “Bus error”. This signal is also produced when an invalid memory is accessed. It may seem to be the same as SIGSEGV but in SIGSEGV, the memory location referenced is valid but in the case of SIGBUS, memory referenced does not exist i.e de-referencing a memory location out of memory space.
- SIGABRT –
If an error itself is detected by the program then this signal is generated using call to abort(). This signal is also used by the standard library to report an internal error. assert() function in c++ also uses abort() to generate this signal.
C++
#include <iostream>
using namespace std;
int main() {
int arr[5] = {1, 2, 3, 4, 5};
arr[6] = 6;
return 0;
}
Output:
Abort signal from abort(3) (SIGABRT)
- SIGSYS –
This signal is sent to process when an invalid argument is passed to a system call.
- SIGTRAP –
This signal is sent to process when an exception has occurred. This is requested by the debugger to get informed. For example, if a variable changes its value then this will trigger it.
Refer for – Segmentation Fault (SIGSEGV) vs Bus Error (SIGBUS)
сигнал ошибки
- сигнал ошибки
-
сигнал рассогласования
Словарь русских синонимов по технологиям автоматического контроля.
.
1981.
Смотреть что такое «сигнал ошибки» в других словарях:
-
сигнал ошибки — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN error signal … Справочник технического переводчика
-
сигнал ошибки — klaidos signalas statusas T sritis automatika atitikmenys: angl. error signal vok. Fehlersignal, n rus. сигнал ошибки, m pranc. signal d erreur, m … Automatikos terminų žodynas
-
сигнал ошибки — klaidos signalas statusas T sritis fizika atitikmenys: angl. error signal vok. Fehlersignal, n rus. сигнал ошибки, m pranc. signal d’erreur, m … Fizikos terminų žodynas
-
сигнал ошибки при передаче — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN transmission error alarm … Справочник технического переводчика
-
сигнал рассогласования — сигнал ошибки … Словарь русских синонимов по технологиям автоматического контроля
-
Ошибки первого и второго рода — Ошибки первого рода (англ. type I errors, α errors, false positives) и ошибки второго рода (англ. type II errors, β errors, false negatives) в математической статистике это ключевые понятия задач проверки статистических гипотез.… … Википедия
-
сигнал тревоги — Сигнал, передаваемый устройством при обнаружении ошибки или получении сигнала тревоги от другого устройства. [http://www.lexikon.ru/dict/net/index.html] Тематики сети вычислительные EN Alarm Indication SignalAIS … Справочник технического переводчика
-
сигнал — 3.4 сигнал (signal): Воздействие на органы чувств оператора, характеризующее состояние или изменение состояния производственного оборудования. Настоящий стандарт описывает сигналы, распознаваемые органами зрения (видеодисплей), слуха… … Словарь-справочник терминов нормативно-технической документации
-
сигнал тревоги — 3.1 сигнал тревоги (alert): Моментальное оповещение о том, что информационная система и сеть подвергаются атаке или находятся в опасности вследствие несчастного случая, сбоя или ошибки человека. Источник … Словарь-справочник терминов нормативно-технической документации
-
выходной сигнал — 3.8 выходной сигнал (output signal): Сигнал, генерируемый двуручным устройством управления, который обеспечивает управление машиной и основан на одной паре входных сигналов (см. рисунок 1). Источник … Словарь-справочник терминов нормативно-технической документации
Лекция 17.
Расчет
установившейся ошибки в системах
управления. Структурные признаки
астатизма. Коэффициенты ошибок
Установившейся
(статической) ошибкой называют постоянное
значение сигнала ошибки x(t)=g(t)-y(t),
которое она приобретает по окончании
переходного процесса:
![]() ,
,
рисунок 116.

Очевидно,
установившаяся ошибка зависит от законов
изменения и численных характеристик
входных сигналов системы. Поэтому при
ее определении принято рассматривать
так называемые типовые входные сигналы,
законы изменения которых составляют
степенной ряд относительно времени.
Например, для задающего воздействия:
![]() ,
,
![]() ,
,
![]()
и так далее.
При наличии
нескольких воздействий на линейную
систему для определения xуст
используется принцип суперпозиции –
реакция линейной системы на совокупность
входных сигналов совпадает с алгебраической
суммой ее реакций на каждый из сигналов
в отдельности:
![]() ,
,
где каждое слагаемое,
или составляющая сигнала ошибки,
![]() определяется
определяется
для i-го
входного сигнала при условии, что
остальные тождественно равны нулю.
Такой подход полностью соответствует
определению передаточной функции и
позволяет выполнять расчет установившейся
ошибки на основе структурной схемы
системы.
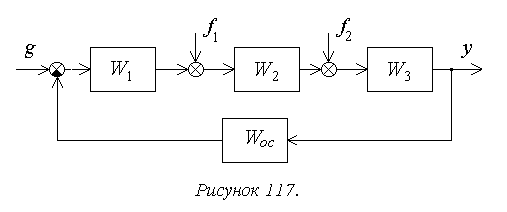
Рассмотрим порядок
расчета установившейся ошибки на
следующем достаточно общем примере
(рисунок 117).
В соответствии с
принципом суперпозиции установившаяся
ошибка будет определяться здесь в виде
суммы трех составляющих
![]() .
.
Изображение по
Лапласу ошибки от задающего воздействия
получают через передаточную функцию
замкнутой системы по ошибке
![]()
при известном изображении задающего
воздействия G(s):
![]() ,
,
где (s)
– основная передаточная функция
замкнутой системы. Для структурной
схемы на рисунке 117
![]() ,
,
где
![]()
— передаточная функция разомкнутой
системы, или прямой цепи системы, для
рассматриваемого примера.
Непосредственно
для расчета установившегося значения
ошибки от задающего воздействия
используют теорему о конечном значении
для преобразования Лапласа:
![]()
В результате:
![]() .
.
Изображение по
Лапласу ошибки от возмущающего воздействия
получают через передаточную функцию
замкнутой системы по ошибке от возмущения
![]()
при известном изображении возмущающего
воздействия F(s):
![]() ,
,
где f(s)
–передаточная функция замкнутой системы
по возмущающему воздействию,
![]() ;
;
Wf(s)
– передаточная функция разомкнутой
системы по возмущению (передаточная
функция участка прямой цепи системы от
точки приложения возмущающего воздействия
до выхода системы).
Для структурной
схемы на рисунке 8 необходимо учитывать
два возмущающих воздействия, приложенные
в различные точки системы.
Для f1:
![]() ,
,
![]() ,
,
 .
.
Для f2:
![]() ,
,
![]() ,
,
 .
.
Расчет упрощается
для системы с единичной отрицательной
обратной связью (рисунок 118):

 ,
,
 ,
,
где k=k1k2k3
– коэффициент передачи разомкнутой
системы.
Найдем установившуюся
ошибку для некоторых типовых вариантов
задающего воздействия.
При
![]()
получим:
![]()
 .
.
При
![]()
получим:
 .
.
При
![]()
получим:
 .
.
Если установившаяся
ошибка тождественно равна нулю при
каком-либо типовом варианте входного
сигнала, независимо от его численных
характеристик, систему называют
астатической по рассматриваемому
входному сигналу.
Количество типовых
вариантов входного сигнала – членов
степенного ряда, при которых установившаяся
ошибка тождественно равна нулю, определяет
порядок астатизма.
Рассматриваемая
система обладает свойством астатизма
второго порядка по задающему воздействию.
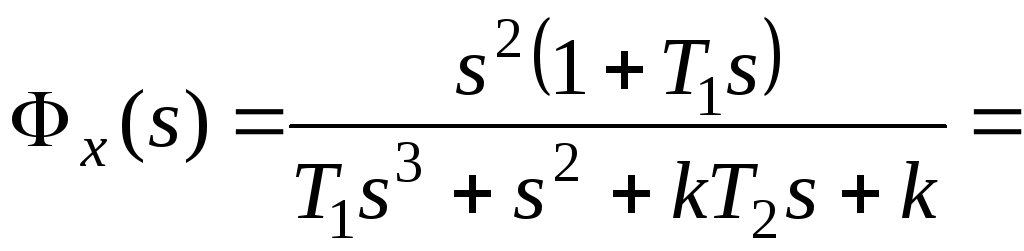
Рассмотрим
установившуюся ошибку от возмущения
f1:
![]() ,
,
 ,
,
где
![]()
– коэффициент передачи разомкнутой
системы по возмущению f1.
При
![]()
получим:
![]()
 .
.
При
![]()
получим:
 .
.
При
![]()
получим тот же результат.
Отметим, что по
возмущению f1
рассматриваемая система не является
астатической. Кроме того, она не в
состоянии отработать два последних
варианта входного сигнала.
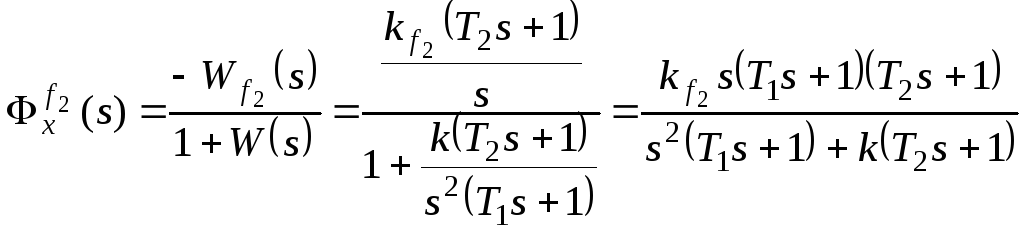
Рассмотрим
установившуюся ошибку от возмущения
f2:
![]() ,
,
 ,
,
где
![]()
– коэффициент передачи разомкнутой
системы по возмущению f2.
При
![]()
получим:
![]()
 .
.
При
![]()
получим:
 .
.
При
![]()
получим:
 .
.
По возмущению f2
рассматриваемая система имеет астатизм
первого порядка. Она не в состоянии
отработать возмущающее воздействие,
изменяющееся во времени с постоянным
ускорением.
Подведем некоторые
итоги:
1. Наличие и глубина
свойства астатизма зависят от точки
приложения входного сигнала.
2. Постоянные
времени звеньев системы не влияют на
ее точность.
3. Увеличение
значения коэффициента передачи
разомкнутой системы приводит к снижению
величины установившейся ошибки.
Для систем с
единичной отрицательной обратной связью
существуют достаточно простые структурные
признаки астатизма.
Рассмотрим
структуру, показанную на рисунке 119.

В общем случае
передаточная функция разомкнутой
системы может быть представлена в
следующей форме:
 ,
,
где l0.
Тогда получим:

и для общего вида
задающего воздействия
![]() ,
,
которому соответствует изображение
![]() ,
,
 .
.
Результат нахождения
этого предела зависит от соотношения
показателей степени:
— при l>v
установившаяся ошибка равна нулю
независимо от остальных параметров, то
есть имеет место астатизм;
— при l=v
получаем константу;
— при l<v
установившаяся ошибка стремится к
бесконечности, то есть система не в
состоянии отработать входной сигнал.
Учитывая, что
минимальное значение v
нулевое, получаем условие астатизма по
задающему воздействию: l>0.
Таким образом,
структурный признак астатизма по
задающему воздействию в системе с
единичной отрицательной обратной связью
состоит в наличии нулевых корней в
знаменателе передаточной функции
разомкнутой системы, или интегрирующих
звеньев в прямой цепи системы.
Нетрудно также
убедиться, что положительное значение
l
совпадает с порядком астатизма.
Для получения
признака астатизма по возмущающему
воздействию представим передаточные
функции на рисунке 10 в форме:
 ,
,
 ,
,
где l1+l2=l,
k1k2=k,
m1+m2=m,
n1+n2=n,
причем
![]()
и
![]() .
.
Тогда получим:


и для общего вида
возмущающего воздействия
![]() ,
,
которому соответствует изображение
![]() ,
,
 .
.
Все вышеприведенные
выводы можно повторить для показателя
степени l1.
Таким образом,
структурный признак астатизма по
возмущающему воздействию в системе с
единичной отрицательной обратной связью
состоит в наличии нулевых корней в
знаменателе передаточной функции
участка системы до точки приложения
воздействия, или интегрирующих звеньев
на том же участке.
Более общий подход
к оценке точности линейных систем
управления основан на получении и
использовании коэффициентов ошибок.
Рассмотрим его на примере анализа
реакции системы на задающее воздействие.
Если рассматривать
произвольный закон изменения задающего
воздействия g(t),
то эта функция времени может быть
разложена в степенной ряд относительно
аргумента t.
Члены степенного ряда, как известно,
находятся через производные
![]() ,
,
![]() ,
,
…,
![]() ,
,
…
В общем случае ряд
бесконечен. Поэтому с практической
точки зрения рассматривать такое
представление сигнала целесообразно
только при достаточно плавном его
изменении, когда можно ограничиться
конечным числом членов ряда, имея в
виду, что при n
большем некоторого m
можно принять
![]() ,
,
n>m.
Для задачи оценки
установившейся ошибки при
![]()
с формулированное допущение вполне
корректно, так как в противном случае
эта задача не имеет смысла.
Коэффициенты
ошибки получают разложением передаточной
функции замкнутой системы по ошибке в
степенной ряд (ряд Тейлора) относительно
аргумента s:
![]() ,
,
где коэффициенты
разложения в общем случае находят как
значения производных в точке s=0:
 .
.
Передаточные
функции, представляющие собой отношения
полиномов, при достаточно высоком
порядке системы могут оказаться слишком
сложными для дифференцирования. Поэтому
на практике коэффициенты их разложения
в ряд чаще находят путем деления полиномов
– числителя на знаменатель.
С учетом разложения
передаточной функции в ряд можно записать
изображение по Лапласу сигнала ошибки
в следующей форме:
![]() .
.
Отметим, что с
учетом сформулированного выше допущения
такое представление сигнала ошибки
соответствует
![]()
или
![]() .
.
Перейдя к оригиналу
с учетом теоремы дифференцирования
получим:
![]() .
.
Вернемся к
рассмотренному выше примеру и предположим,
что задающее воздействие изменяется
по произвольному закону, но при достаточно
больших значениях времени этот закон
аппроксимируется выражением
![]() .
.
Найдем коэффициенты
разложения передаточной функции по
ошибке

в степенной ряд.
Здесь сразу можно
отметить, что номер первого ненулевого
члена ряда определяется низшей степенью
аргумента s
в числителе дроби, то есть первые два
коэффициента c0
и c1
здесь получаем тождественно равными
нулю.
Далее получим:





В результате
получаем
![]() ,
,
![]() ,
,
![]() ,
,
![]()
и так далее.
Найдем производные
задающего воздействия:
![]() ,
,
![]() ,
,
![]() .
.
Ясно, что для
определения установившейся ошибки
достаточно первых трех коэффициентов:
![]() .
.
В заключение
отметим, что порядок астатизма системы
по какому-либо входному сигналу совпадает
с количеством нулевых коэффициентов
ошибки, получаемых в разложении в ряд
передаточной функции по ошибке от
данного входного сигнала.
Соседние файлы в папке Конспект ТАУ
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Макеты страниц
Полезный отклик и сигнал ошибки
Адаптивный линейный сумматор можно использовать в системах как с обратной, так и без обратной связи. Как отмечалось при рассмотрении рис. 1.2, процесс коррекции вектора весовых коэффициентов в системе без обратной связи в явном виде не зависит от выходного сигнала и определяется только входным сигналом и состоянием окружающей среды.
Однако в системе с обратной связью, показанной на рис. 1.3, вектор весовых коэффициентов зависит от выходного сигнала, а также от других данных. Вообще в адаптивном линейном сумматоре другими данными являются полезный отклик или обучающий сигнал. В данной книге обсуждаются прежде всего системы с функциональной обратной связью, поэтому необходимо четкое понимание существа этих сигналов.
В процессе адаптации с функциональной обратной связью вектор весовых коэффициентов линейного сумматора корректируется таким образом, чтобы выходной сигнал  имел наилучшее приближение к полезному отклику. Для этого выходной сигнал сравнивается с полезным откликом, формируется сигнал ошибки и затем корректируется или оптимизируется вектор весовых коэффициентов, минимизирующий сигнал ошибки. В большинстве практических случаев процесс адаптации направлен на минимизацию среднеквадратического значения, иди средней мощности сигнала ошибки.
имел наилучшее приближение к полезному отклику. Для этого выходной сигнал сравнивается с полезным откликом, формируется сигнал ошибки и затем корректируется или оптимизируется вектор весовых коэффициентов, минимизирующий сигнал ошибки. В большинстве практических случаев процесс адаптации направлен на минимизацию среднеквадратического значения, иди средней мощности сигнала ошибки.

Рис. 2.4. Сигналы полезного отклика и ошибки в адаптивном линейном сумматоре с многими входами
Оптимизация по этому критерию как в адаптивных, так и в неадаптивных системах давно и широко применяется и имеет много достоинств [1,8-16].
На рис. 2.4 показан способ получения сигнала ошибки в системе с многими входами за счет введения полезного отклика. Для формирования сигнала ошибка ел выходной сигнал  просто вычитается из полезного сигнала
просто вычитается из полезного сигнала 
Источник сигиала полезного отклика  определяется конкретным применением адаптивного сумматора. Пока будем считать, что такой сигнал уже имеется. Более подробно вопрос его формирования рассматривается в последующих главах. Однако отметим, что зачастую для того, чтобы найти подходящий сигнал, требуется значительная изобретательность, поскольку если бы в действительности полезный сигнал имелся, то адаптивная система была бы не нужна.
определяется конкретным применением адаптивного сумматора. Пока будем считать, что такой сигнал уже имеется. Более подробно вопрос его формирования рассматривается в последующих главах. Однако отметим, что зачастую для того, чтобы найти подходящий сигнал, требуется значительная изобретательность, поскольку если бы в действительности полезный сигнал имелся, то адаптивная система была бы не нужна.
Рассмотрим теперь только что введенную рабочую функцию.