Знакомимся с методом обратного распространения ошибки
Всем привет! Новогодние праздники подошли к концу, а это значит, что мы вновь готовы делиться с вами полезным материалом. Перевод данной статьи подготовлен в преддверии запуска нового потока по курсу «Алгоритмы для разработчиков».
Поехали!

Метод обратного распространения ошибки – вероятно самая фундаментальная составляющая нейронной сети. Впервые он был описан в 1960-е и почти 30 лет спустя его популяризировали Румельхарт, Хинтон и Уильямс в статье под названием «Learning representations by back-propagating errors».
Метод используется для эффективного обучения нейронной сети с помощью так называемого цепного правила (правила дифференцирования сложной функции). Проще говоря, после каждого прохода по сети обратное распространение выполняет проход в обратную сторону и регулирует параметры модели (веса и смещения).
В этой статья я хотел бы подробно рассмотреть с точки зрения математики процесс обучения и оптимизации простой 4-х слойной нейронной сети. Я считаю, что это поможет читателю понять, как работает обратное распространение, а также осознать его значимость.
Определяем модель нейронной сети
Четырехслойная нейронная сеть состоит из четырех нейронов входного слоя, четырех нейронов на скрытых слоях и 1 нейрона на выходном слое.

Простое изображение четырехслойной нейронной сети.
Входной слой
На рисунке нейроны фиолетового цвета представляют собой входные данные. Они могут быть простыми скалярными величинами или более сложными – векторами или многомерными матрицами.

Уравнение, описывающее входы xi.
Первый набор активаций (а) равен входным значениям. «Активация» — это значение нейрона после применения функции активации. Подробнее смотрите ниже.
Скрытые слои
Конечные значения в скрытых нейронах (на рисунке зеленого цвета) вычисляются с использованием zl – взвешенных входов в слое I и aI активаций в слое L. Для слоев 2 и 3 уравнения будут следующими:
Для l = 2:

Для l = 3:

W2 и W3 – это веса на слоях 2 и 3, а b2 и b3 – смещения на этих слоях.
Активации a2 и a3 вычисляются с помощью функции активации f. Например, эта функция f является нелинейной (как сигмоид, ReLU и гиперболический тангенс) и позволяет сети изучать сложные паттерны в данных. Мы не будем подробно останавливаться на том, как работают функции активации, но, если вам интересно, я настоятельно рекомендую прочитать эту замечательную статью.
Присмотревшись внимательно, вы увидите, что все x, z2, a2, z3, a3, W1, W2, b1 и b2 не имеют нижних индексов, представленных на рисунке четырехслойной нейронной сети. Дело в том, что мы объединили все значения параметров в матрицы, сгруппированные по слоям. Это стандартный способ работы с нейронными сетями, и он довольно комфортный. Однако я пройдусь по уравнениям, чтобы не возникло путаницы.
Давайте возьмем слой 2 и его параметры в качестве примера. Те же самые операции можно применить к любому слою нейронной сети.
W1 – это матрица весов размерности (n, m), где n – это количество выходных нейронов (нейронов на следующем слое), а m – число входных нейронов (нейронов в предыдущем слое). В нашем случае n = 2 и m = 4.

Здесь первое число в нижнем индексе любого из весов соответствует индексу нейрона в следующем слое (в нашем случае – это второй скрытый слой), а второе число соответствует индексу нейрона в предыдущем слое (в нашем случае – это входной слой).
x – входной вектор размерностью (m, 1), где m – число входных нейронов. В нашем случае m = 4.

b1 – это вектор смещения размерности (n, 1), где n – число нейронов на текущем слое. В нашем случае n = 2.

Следуя уравнению для z2 мы можем использовать приведенные выше определения W1, x и b1 для получения уравнения z2:

Теперь внимательно посмотрите на иллюстрацию нейронной сети выше:

Как видите, z2 можно выразить через z12 и z22, где z12 и z22 – суммы произведений каждого входного значения xi на соответствующий вес Wij1.
Это приводит к тому же самому уравнению для z2 и доказывает, что матричные представления z2, a2, z3 и a3 – верны.
Выходной слой
Последняя часть нейронной сети – это выходной слой, который выдает прогнозируемое значение. В нашем простом примере он представлен в виде одного нейрона, окрашенного в синий цвет и рассчитываемого следующим образом:

И снова мы используем матричное представление для упрощения уравнения. Можно использовать вышеприведенные методы, чтобы понять лежащую в их основе логику.
Прямое распространение и оценка
Приведенные выше уравнения формируют прямое распространение по нейронной сети. Вот краткий обзор:

(1) – входной слой
(2) – значение нейрона на первом скрытом слое
(3) – значение активации на первом скрытом слое
(4) – значение нейрона на втором скрытом слое
(5) – значение активации на втором скрытом уровне
(6) – выходной слой
Заключительным шагом в прямом проходе является оценка прогнозируемого выходного значения s относительно ожидаемого выходного значения y.
Выходные данные y являются частью обучающего набора данных (x, y), где x – входные данные (как мы помним из предыдущего раздела).
Оценка между s и y происходит через функцию потерь. Она может быть простой как среднеквадратичная ошибка или более сложной как перекрестная энтропия.
Мы назовем эту функцию потерь С и обозначим ее следующим образом:

Где cost может равняться среднеквадратичной ошибке, перекрестной энтропии или любой другой функции потерь.
Основываясь на значении С, модель «знает», насколько нужно скорректировать ее параметры, чтобы приблизиться к ожидаемому выходному значению y. Это происходит с помощью метода обратного распространения ошибки.
Обратное распространение ошибки и вычисление градиентов
Опираясь на статью 1989 года, метод обратного распространения ошибки:
Постоянно настраивает веса соединений в сети, чтобы минимизировать меру разности между фактическим выходным вектором сети и желаемым выходным вектором.
и
…дает возможность создавать полезные новые функции, что отличает обратное распространение от более ранних и простых методов…
Другими словами, обратное распространение направлено на минимизацию функции потерь путем корректировки весов и смещений сети. Степень корректировки определяется градиентами функции потерь по отношению к этим параметрам.
Возникает один вопрос: Зачем вычислять градиенты?
Чтобы ответить на этот вопрос, нам сначала нужно пересмотреть некоторые понятия вычислений:
Градиентом функции С(x1, x2, …, xm) в точке x называется вектор частных производных С по x.

Производная функции С отражает чувствительность к изменению значения функции (выходного значения) относительно изменения ее аргумента х (входного значения). Другими словами, производная говорит нам в каком направлении движется С.
Градиент показывает, насколько необходимо изменить параметр x (в положительную или отрицательную сторону), чтобы минимизировать С.
Вычисление этих градиентов происходит с помощью метода, называемого цепным правилом.
Для одного веса (wjk)l градиент равен:

(1) Цепное правило
(2) По определению m – количество нейронов на l – 1 слое
(3) Вычисление производной
(4) Окончательное значение
Аналогичный набор уравнений можно применить к (bj)l:
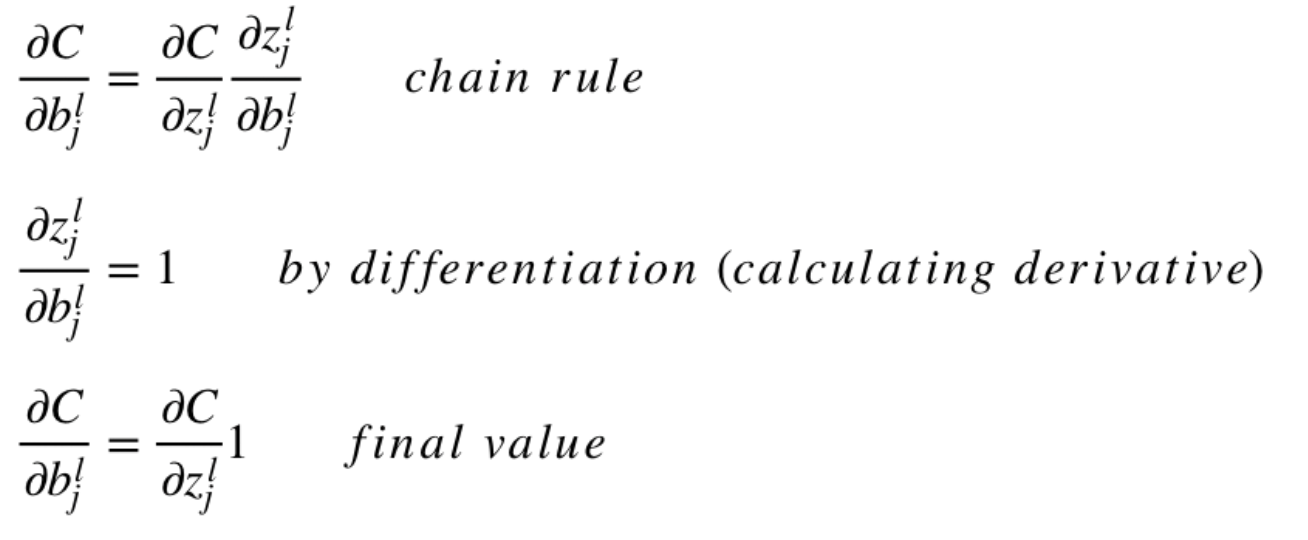
(1) Цепное правило
(2) Вычисление производной
(3) Окончательное значение
Общая часть в обоих уравнениях часто называется «локальным градиентом» и выражается следующим образом:

«Локальный градиент» можно легко определить с помощью правила цепи. Этот процесс я не буду сейчас расписывать.
Градиенты позволяют оптимизировать параметры модели:
Пока не будет достигнут критерий остановки выполняется следующее:
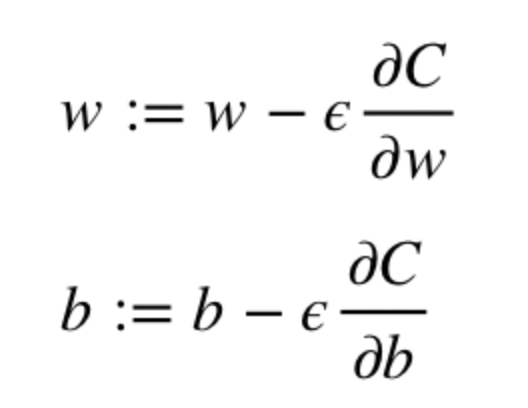
Алгоритм оптимизации весов и смещений (также называемый градиентным спуском)
- Начальные значения w и b выбираются случайным образом.
- Эпсилон (e) – это скорость обучения. Он определяет влияние градиента.
- w и b – матричные представления весов и смещений.
- Производная C по w или b может быть вычислена с использованием частных производных С по отдельным весам или смещениям.
- Условие завершение выполняется, как только функция потерь минимизируется.
Заключительную часть этого раздела я хочу посвятить простому примеру, в котором мы рассчитаем градиент С относительно одного веса (w22)2.
Давайте увеличим масштаб нижней части вышеупомянутой нейронной сети:

Визуальное представление обратного распространения в нейронной сети
Вес (w22)2 соединяет (a2)2 и (z2)2, поэтому вычисление градиента требует применения цепного правила на (z2)3 и (a2)3:

Вычисление конечного значения производной С по (a2)3 требует знания функции С. Поскольку С зависит от (a2)3, вычисление производной должно быть простым.
Я надеюсь, что этот пример сумел пролить немного света на математику, стоящую за вычислением градиентов. Если захотите узнать больше, я настоятельно рекомендую вам посмотреть Стэндфордскую серию статей по NLP, где Ричард Сочер дает 4 замечательных объяснения обратного распространения.
Заключительное замечание
В этой статье я подробно объяснил, как обратное распространение ошибки работает под капотом с помощью математических методов, таких как вычисление градиентов, цепное правило и т.д. Знание механизмов этого алгоритма укрепит ваши знания о нейронных сетях и позволит вам чувствовать себя комфортно при работе с более сложными моделями. Удачи вам в путешествии по глубокому обучению!
На этом все. Приглашаем всех на бесплатный вебинар по теме «Дерево отрезков: просто и быстро».
Recovery mode
Из песочницы
Тема нейронных сетей была уже ни раз освещена на хабре, однако сегодня я бы хотел познакомить читателей с алгоритмом обучения многослойной нейронной сети методом обратного распространения ошибки и привести реализацию данного метода.
Сразу хочу оговориться, что не являюсь экспертом в области нейронных сетей, поэтому жду от читателей конструктивной критики, замечаний и дополнений.
Теоретическая часть
Данный материал предполагает знакомство с основами нейронных сетей, однако я считаю возможным ввести читателя в курс темы без излишних мытарств по теории нейронных сетей. Итак, для тех, кто впервые слышит словосочетание «нейронная сеть», предлагаю воспринимать нейронную сеть в качестве взвешенного направленного графа, узлы ( нейроны ) которого расположены слоями. Кроме того, узел одного слоя имеет связи со всеми узлами предыдущего слоя. В нашем случае у такого графа будут иметься входной и выходной слои, узлы которых выполняют роль входов и
выходов соответственно. Каждый узел ( нейрон ) обладает активационной функцией — функцией, ответственной за вычисление сигнала на выходе узла ( нейрона ). Также существует понятие смещения, представляющего из себя узел, на выходе которого всегда появляется единица. В данной статье мы будем рассматривать процесс обучения нейронной сети, предполагающий наличие «учителя», то есть процесс обучения, при котором обучение происходит путем предоставления сети последовательности обучающих примеров с правильными откликами.
Как и в случае с большинством нейронных сетей, наша цель состоит в обучении сети таким образом, чтобы достичь баланса между способностью сети давать верный отклик на входные данные, использовавшиеся в процессе обучения ( запоминания ), и способностью выдавать правильные результаты в ответ на входные данные, схожие, но неидентичные тем, что были использованы при обучении ( принцип обобщения). Обучение сети методом обратного распространения ошибки включает в себя три этапа: подачу на вход данных, с последующим распространением данных в направлении выходов, вычисление и обратное распространение соответствующей ошибки и корректировку весов. После обучения предполагается лишь подача на вход сети данных и распространение их в направлении выходов. При этом, если обучение сети может являться довольно длительным процессом, то непосредственное вычисление результатов обученной сетью происходит очень быстро. Кроме того, существуют многочисленные вариации метода обратного распространения ошибки, разработанные с целью увеличения скорости протекания
процесса обучения.
Также стоит отметить, что однослойная нейронная сеть существенно ограничена в том, обучению каким шаблонам входных данных она подлежит, в то время, как многослойная сеть ( с одним или более скрытым слоем ) не имеет такого недостатка. Далее будет дано описание стандартной нейронной сети с обратным распространением ошибки.
Архитектура
На рисунке 1 показана многослойная нейронная сеть с одним слоем скрытых нейронов ( элементы Z ).
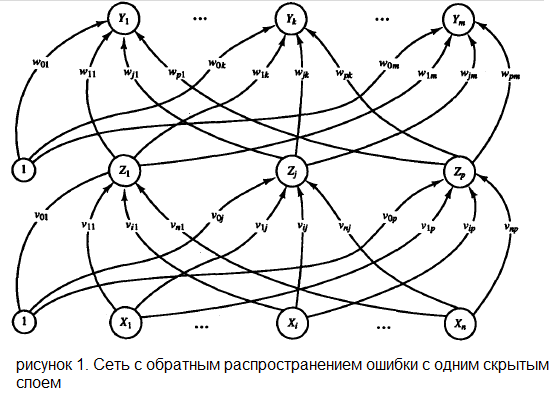
Нейроны, представляющие собой выходы сети ( обозначены  ), и скрытые нейроны могут иметь смещение( как показано на изображении ). Смещение, соответствующий выходу
), и скрытые нейроны могут иметь смещение( как показано на изображении ). Смещение, соответствующий выходу  обозначен
обозначен , скрытому элементу
, скрытому элементу  —
—  . Эти смещения служат в качестве весов на связях, исходящих от нейронов, на выходе которых всегда появляется 1 ( на рисунке 1 они показаны, но обычно явно не отображаются, подразумеваясь). Кроме того, на рисунке 1 стрелками показано перемещение информации в ходе фазы распространения данных от входов к выходам. В процессе обучения сигналы распространяются в обратном направлении.
. Эти смещения служат в качестве весов на связях, исходящих от нейронов, на выходе которых всегда появляется 1 ( на рисунке 1 они показаны, но обычно явно не отображаются, подразумеваясь). Кроме того, на рисунке 1 стрелками показано перемещение информации в ходе фазы распространения данных от входов к выходам. В процессе обучения сигналы распространяются в обратном направлении.
Описание алгоритма
Алгоритм, представленный далее, применим к нейронной сети с одним скрытым слоем, что является допустимой и адекватной ситуацией для большинства приложений. Как уже было сказано ранее, обучение сети включает в себя три стадии: подача на входы сети обучающих данных, обратное распространение ошибки и корректировка весов. В ходе первого этапа каждый входной нейрон  получает сигнал и широковещательно транслирует его каждому из скрытых нейронов
получает сигнал и широковещательно транслирует его каждому из скрытых нейронов  . Каждый скрытый нейрон затем вычисляет результат его активационной функции ( сетевой функции ) и рассылает свой сигнал
. Каждый скрытый нейрон затем вычисляет результат его активационной функции ( сетевой функции ) и рассылает свой сигнал  всем выходным нейронам. Каждый выходной нейрон , в свою очередь, вычисляет результат своей активационной функции
всем выходным нейронам. Каждый выходной нейрон , в свою очередь, вычисляет результат своей активационной функции  , который представляет собой ничто иное, как выходной сигнал данного нейрона для соответствующих входных данных. В процессе обучения, каждый нейрон на выходе сети сравнивает вычисленное значение с предоставленным учителем
, который представляет собой ничто иное, как выходной сигнал данного нейрона для соответствующих входных данных. В процессе обучения, каждый нейрон на выходе сети сравнивает вычисленное значение с предоставленным учителем  ( целевым значением ), определяя соответствующее значение ошибки для данного входного шаблона. На основании этой ошибки вычисляется
( целевым значением ), определяя соответствующее значение ошибки для данного входного шаблона. На основании этой ошибки вычисляется  .
.  используется при распространении ошибки от до всех элементов сети предыдущего слоя ( скрытых нейронов, связанных с ), а также позже при изменении весов связей между выходными нейронами и скрытыми. Аналогичным образом вычисляется
используется при распространении ошибки от до всех элементов сети предыдущего слоя ( скрытых нейронов, связанных с ), а также позже при изменении весов связей между выходными нейронами и скрытыми. Аналогичным образом вычисляется  для каждого скрытого нейрона . Несмотря на то, что распространять ошибку до входного слоя необходимости нет,
для каждого скрытого нейрона . Несмотря на то, что распространять ошибку до входного слоя необходимости нет,  используется для изменения весов связей между нейронами скрытого слоя и входными нейронами. После того как все
используется для изменения весов связей между нейронами скрытого слоя и входными нейронами. После того как все  были определены, происходит одновременная корректировка весов всех связей.
были определены, происходит одновременная корректировка весов всех связей.
Обозначения:
В алгоритме обучения сети используются следующие обозначения:
 Входной вектор обучающих данных
Входной вектор обучающих данных 
 Вектор целевых выходных значений, предоставляемых учителем
Вектор целевых выходных значений, предоставляемых учителем
Составляющая корректировки весов связей  , соответствующая ошибке выходного нейрона ; также, информация об ошибке нейрона , которая распространяется тем нейронам скрытого слоя, которые связаны с .
, соответствующая ошибке выходного нейрона ; также, информация об ошибке нейрона , которая распространяется тем нейронам скрытого слоя, которые связаны с .
Составляющая корректировки весов связей , соответствующая распространяемой от выходного слоя к скрытому нейрону информации об ошибке.
, соответствующая распространяемой от выходного слоя к скрытому нейрону информации об ошибке.
 Скорость обучения.
Скорость обучения.
 Нейрон на входе с индексом i. Для входных нейронов входной и выходной сигналы одинаковы — .
Нейрон на входе с индексом i. Для входных нейронов входной и выходной сигналы одинаковы — .
Смещение скрытого нейрона j.
Скрытый нейрон j; Суммарное значение подаваемое на вход скрытого элемента обозначается  :
: 
Сигнал на выходе ( результат применения к активационной функции ) обозначается : 
Смещение нейрона на выходе.
Нейрон на выходе под индексом k; Суммарное значение подаваемое на вход выходного элемента обозначается  :
:  . Сигнал на выходе ( результат применения к активационной функции ) обозначается :
. Сигнал на выходе ( результат применения к активационной функции ) обозначается :
Функция активации
Функция активация в алгоритме обратного распространения ошибки должна обладать несколькими важными характеристиками: непрерывностью, дифференцируемостью и являться монотонно неубывающей. Более того, ради эффективности вычислений, желательно, чтобы ее производная легко находилась. Зачастую, активационная функция также является функцией с насыщением. Одной из наиболее часто используемых активационных функций является бинарная сигмоидальная функция с областью значений в ( 0, 1 ) и определенная как:


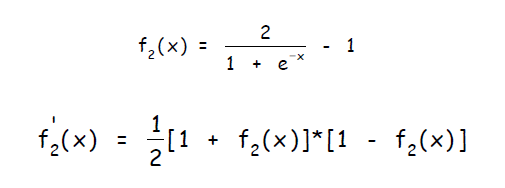
Другой широко распространенной активационной функцией является биполярный сигмоид с областью значений ( -1, 1 ) и определенный как:
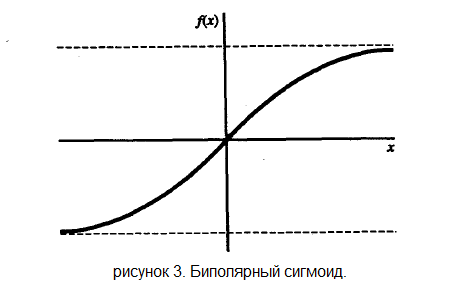
Алгоритм обучения
Алгоритм обучения выглядит следующим образом:
Шаг 0.
Инициализация весов ( веса всех связей инициализируются случайными небольшими значениями ).
Шаг 1.
До тех пор пока условие прекращения работы алгоритма неверно, выполняются шаги 2 — 9.
Шаг 2.
Для каждой пары { данные, целевое значение } выполняются шаги 3 — 8.
Распространение данных от входов к выходам:
Шаг 3.
Каждый входной нейрон  отправляет полученный сигнал всем нейронам в следующем слое ( скрытом ).
отправляет полученный сигнал всем нейронам в следующем слое ( скрытом ).
Шаг 4.
Каждый скрытый нейрон  суммирует взвешенные входящие сигналы: и применяет активационную функцию: После чего посылает результат всем элементам следующего слоя ( выходного ).
суммирует взвешенные входящие сигналы: и применяет активационную функцию: После чего посылает результат всем элементам следующего слоя ( выходного ).
Шаг 5.
Каждый выходной нейрон  суммирует взвешенные входящие сигналы: и применяет активационную функцию, вычисляя выходной сигнал:
суммирует взвешенные входящие сигналы: и применяет активационную функцию, вычисляя выходной сигнал: 
Обратное распространение ошибки:
Шаг 6.
Каждый выходной нейрон получает целевое значение — то выходное значение, которое является правильным для данного входного сигнала, и вычисляет ошибку:  , так же вычисляет величину, на которую изменится вес связи :
, так же вычисляет величину, на которую изменится вес связи :  . Помимо этого, вычисляет величину корректировки смещения:
. Помимо этого, вычисляет величину корректировки смещения:  и посылает нейронам в предыдущем слое.
и посылает нейронам в предыдущем слое.
Шаг 7.
Каждый скрытый нейрон суммирует входящие ошибки ( от нейронов в последующем слое )  и вычисляет величину ошибки, умножая полученное значение на производную активационной функции:
и вычисляет величину ошибки, умножая полученное значение на производную активационной функции:  , так же вычисляет величину, на которую изменится вес связи :
, так же вычисляет величину, на которую изменится вес связи :  . Помимо этого, вычисляет величину корректировки смещения:
. Помимо этого, вычисляет величину корректировки смещения: 
Шаг 8. Изменение весов.
Каждый выходной нейрон изменяет веса своих связей с элементом смещения и скрытыми нейронами: 
Каждый скрытый нейрон изменяет веса своих связей с элементом смещения и выходными нейронами: 
Шаг 9.
Проверка условия прекращения работы алгоритма.
Условием прекращения работы алгоритма может быть как достижение суммарной квадратичной ошибкой результата на выходе сети предустановленного заранее минимума в ходе процесса обучения, так и выполнения определенного количества итераций алгоритма. В основе алгоритма лежит метод под названием градиентный спуск. В зависимости от знака, градиент функции ( в данном случае значение функции — это ошибка, а параметры — это веса связей в сети ) дает направление, в котором значения функции возрастают (или убывают) наиболее стремительно.
Выбор первоначальных весов и смещения
Случайная инициализация. Выбор начальных весов окажет влияние на то, сумеет ли сеть достичь глобального ( или только локального) минимума ошибки, и насколько быстро этот процесс будет происходить. Изменение весов между двумя нейронами связано с производной активационной функции нейрона из последующего слоя и активационной функции нейрона слоя предыдущего. В связи с этим, важно избегать выбора таких начальных весов, которые обнулят активационную функцию или ее производную. Также начальные веса не должны быть слишком большими ( или входные сигнал для каждого скрытого или выходного нейрона скорее всего попадут в регион очень малых значений сигмоида ( регион насыщения ) ). С другой стороны, если начальные веса будут слишком маленькими, то входной сигнал на скрытые или выходные нейроны будет близок к нулю, что также приведет к очень низкой скорости обучения. Стандартная процедура инициализации весов состоит в присвоении им случайных значений в интервале ( -0,5; 0,5). Значения могут быть как положительными, так и отрицательными, так как конечные веса, получающиеся после обучения сети, могут быть обоих знаков. Инициализация Nguyen – Widrow. Представленная далее простая модификация стандартной процедуру инициализации способствует более быстрому обучению: Веса связей скрытых и выходных нейронов, а также смещение выходного слоя инициализируются также, как и в стандартной процедуре — случайными значениями из интервала ( -0,5; 0,5).
Введем обозначения:
 количество входных нейронов
количество входных нейронов
 количество скрытых нейронов
количество скрытых нейронов
 фактор масштабирования:
фактор масштабирования:
Процедура состоит из следующих простых шагов:
Для каждого скрытого нейрона :
инициализировать его вектор весов ( связей с входными нейронами ):

вычислить 
переинициализировать веса: 
задать значение смещения: 
Практическая часть
Начну с реализации концепции нейрона. Было решено представить нейроны входного слоя базовым классом, а скрытые и выходные как декораторы базового класса. Кроме того, нейрон хранит в себе информацию об исходящих и входящих связях, а также каждый нейрон композиционно имеет в своем составе активационную функцию.
Интерфейс нейрона
/**
* Neuron base class.
* Represents a basic element of neural network, node in the net's graph.
* There are several possibilities for creation an object of type Neuron, different constructors suites for
* different situations.
*/
template <typename T>
class Neuron
{
public:
/**
* A default Neuron constructor.
* - Description: Creates a Neuron; general purposes.
* - Purpose: Creates a Neuron, linked to nothing, with a Linear network function.
* - Prerequisites: None.
*/
Neuron( ) : mNetFunc( new Linear ), mSumOfCharges( 0.0 ) { };
/**
* A Neuron constructor based on NetworkFunction.
* - Description: Creates a Neuron; mostly designed to create an output kind of neurons.
* @param inNetFunc - a network function which is producing neuron's output signal;
* - Purpose: Creates a Neuron, linked to nothing, with a specific network function.
* - Prerequisites: The existence of NetworkFunction object.
*/
Neuron( NetworkFunction * inNetFunc ) : mNetFunc( inNetFunc ), mSumOfCharges( 0.0 ){ };
Neuron( std::vector<NeuralLink<T > *>& inLinksToNeurons, NetworkFunction * inNetFunc ) :
mNetFunc( inNetFunc ),
mLinksToNeurons(inLinksToNeurons),
mSumOfCharges(0.0){ };
/**
* A Neuron constructor based on layer of Neurons.
* - Description: Creates a Neuron; mostly designed to create an input and hidden kinds of neurons.
* @param inNeuronsLinkTo - a vector of pointers to Neurons which is representing a layer;
* @param inNetFunc - a network function which is producing neuron's output signal;
* - Purpose: Creates a Neuron, linked to every Neuron in provided layer.
* - Prerequisites: The existence of std::vector<Neuron *> and NetworkFunction.
*/
Neuron( std::vector<Neuron *>& inNeuronsLinkTo, NetworkFunction * inNetFunc );
virtual ~Neuron( );
virtual std::vector<NeuralLink<T > *>& GetLinksToNeurons( ){ return mLinksToNeurons; };
virtual NeuralLink<T> * at( const int& inIndexOfNeuralLink ) { return mLinksToNeurons[ inIndexOfNeuralLink ]; };
virtual void SetLinkToNeuron( NeuralLink<T> * inNeuralLink ){ mLinksToNeurons.push_back( inNeuralLink ); };
virtual void Input( double inInputData ){ mSumOfCharges += inInputData; };
virtual double Fire( );
virtual int GetNumOfLinks( ) { return mLinksToNeurons.size( ); };
virtual double GetSumOfCharges( );
virtual void ResetSumOfCharges( ){ mSumOfCharges = 0.0; };
virtual double Process( ) { return mNetFunc->Process( mSumOfCharges ); };
virtual double Process( double inArg ){ return mNetFunc->Process( inArg ); };
virtual double Derivative( ){ return mNetFunc->Derivative( mSumOfCharges ); };
virtual void SetInputLink( NeuralLink<T> * inLink ){ mInputLinks.push_back( inLink ); };
virtual std::vector<NeuralLink<T > *>& GetInputLink( ){ return mInputLinks; };
virtual double PerformTrainingProcess( double inTarget );
virtual void PerformWeightsUpdating( );
virtual void ShowNeuronState( );
protected:
NetworkFunction * mNetFunc;
std::vector<NeuralLink<T > *> mInputLinks;
std::vector<NeuralLink<T > *> mLinksToNeurons;
double mSumOfCharges;
};
template <typename T>
class OutputLayerNeuronDecorator : public Neuron<T>
{
public:
OutputLayerNeuronDecorator( Neuron<T> * inNeuron ){ mOutputCharge = 0; mNeuron = inNeuron; };
virtual ~OutputLayerNeuronDecorator( );
virtual std::vector<NeuralLink<T > *>& GetLinksToNeurons( ){ return mNeuron->GetLinksToNeurons( ) ;};
virtual NeuralLink<T> * at( const int& inIndexOfNeuralLink ){ return ( mNeuron->at( inIndexOfNeuralLink ) ) ;};
virtual void SetLinkToNeuron( NeuralLink<T> * inNeuralLink ){ mNeuron->SetLinkToNeuron( inNeuralLink ); };
virtual double GetSumOfCharges( ) { return mNeuron->GetSumOfCharges( ); };
virtual void ResetSumOfCharges( ){ mNeuron->ResetSumOfCharges( ); };
virtual void Input( double inInputData ){ mNeuron->Input( inInputData ); };
virtual double Fire( );
virtual int GetNumOfLinks( ) { return mNeuron->GetNumOfLinks( ); };
virtual double Process( ) { return mNeuron->Process( ); };
virtual double Process( double inArg ){ return mNeuron->Process( inArg ); };
virtual double Derivative( ) { return mNeuron->Derivative( ); };
virtual void SetInputLink( NeuralLink<T> * inLink ){ mNeuron->SetInputLink( inLink ); };
virtual std::vector<NeuralLink<T > *>& GetInputLink( ) { return mNeuron->GetInputLink( ); };
virtual double PerformTrainingProcess( double inTarget );
virtual void PerformWeightsUpdating( );
virtual void ShowNeuronState( ) { mNeuron->ShowNeuronState( ); };
protected:
double mOutputCharge;
Neuron<T> * mNeuron;
};
template <typename T>
class HiddenLayerNeuronDecorator : public Neuron<T>
{
public:
HiddenLayerNeuronDecorator( Neuron<T> * inNeuron ) { mNeuron = inNeuron; };
virtual ~HiddenLayerNeuronDecorator( );
virtual std::vector<NeuralLink<T > *>& GetLinksToNeurons( ){ return mNeuron->GetLinksToNeurons( ); };
virtual void SetLinkToNeuron( NeuralLink<T> * inNeuralLink ){ mNeuron->SetLinkToNeuron( inNeuralLink ); };
virtual double GetSumOfCharges( ){ return mNeuron->GetSumOfCharges( ) ;};
virtual void ResetSumOfCharges( ){mNeuron->ResetSumOfCharges( ); };
virtual void Input( double inInputData ){ mNeuron->Input( inInputData ); };
virtual double Fire( );
virtual int GetNumOfLinks( ){ return mNeuron->GetNumOfLinks( ); };
virtual NeuralLink<T> * ( const int& inIndexOfNeuralLink ){ return ( mNeuron->at( inIndexOfNeuralLink) ); };
virtual double Process( ){ return mNeuron->Process( ); };
virtual double Process( double inArg ){ return mNeuron->Process( inArg ); };
virtual double Derivative( ){ return mNeuron->Derivative( ); };
virtual void SetInputLink( NeuralLink<T> * inLink ){ mNeuron->SetInputLink( inLink ); };
virtual std::vector<NeuralLink<T > *>& GetInputLink( ){ return mNeuron->GetInputLink( ); };
virtual double PerformTrainingProcess( double inTarget );
virtual void PerformWeightsUpdating( );
virtual void ShowNeuronState( ){ mNeuron->ShowNeuronState( ); };
protected:
Neuron<T> * mNeuron;
};
Интерфейс нейронных связей представлен ниже, каждая связь хранит вес и указатель на нейрон:
Интерфейс нейронной связи
template <typename T>
class Neuron;
template <typename T>
class NeuralLink
{
public:
NeuralLink( ) : mWeightToNeuron( 0.0 ),
mNeuronLinkedTo( 0 ),
mWeightCorrectionTerm( 0 ),
mErrorInformationTerm( 0 ),
mLastTranslatedSignal( 0 ){ };
NeuralLink( Neuron<T> * inNeuronLinkedTo, double inWeightToNeuron = 0.0 ) :
mWeightToNeuron( inWeightToNeuron ),
mNeuronLinkedTo( inNeuronLinkedTo ),
mWeightCorrectionTerm( 0 ),
mErrorInformationTerm( 0 ),
mLastTranslatedSignal( 0 ){ };
void SetWeight( const double& inWeight ){ mWeightToNeuron = inWeight; };
const double& GetWeight( ){ return mWeightToNeuron; };
void SetNeuronLinkedTo( Neuron<T> * inNeuronLinkedTo ){ mNeuronLinkedTo = inNeuronLinkedTo; };
Neuron<T> * GetNeuronLinkedTo( ){ return mNeuronLinkedTo; };
void SetWeightCorrectionTerm( double inWeightCorrectionTerm ){ mWeightCorrectionTerm = inWeightCorrectionTerm; };
double GetWeightCorrectionTerm( ){ return mWeightCorrectionTerm; };
void UpdateWeight( ){ mWeightToNeuron = mWeightToNeuron + mWeightCorrectionTerm; };
double GetErrorInFormationTerm( ){ return mErrorInformationTerm; };
void SetErrorInFormationTerm( double inEITerm ){ mErrorInformationTerm = inEITerm; };
void SetLastTranslatedSignal( double inLastTranslatedSignal ){ mLastTranslatedSignal = inLastTranslatedSignal; };
double GetLastTranslatedSignal( ){ return mLastTranslatedSignal; };
protected:
double mWeightToNeuron;
Neuron<T> * mNeuronLinkedTo;
double mWeightCorrectionTerm;
double mErrorInformationTerm;
double mLastTranslatedSignal;
};
Каждая активационная функция наследует от абстрактного класса, реализуя саму функцию и производную:
Интерфейс активационной функции
class NetworkFunction {
public:
NetworkFunction(){};
virtual ~NetworkFunction(){};
virtual double Process( double inParam ) = 0;
virtual double Derivative( double inParam ) = 0;
};
class Linear : public NetworkFunction {
public:
Linear(){};
virtual ~Linear(){};
virtual double Process( double inParam ){ return inParam; };
virtual double Derivative( double inParam ){ return 0; };
};
class Sigmoid : public NetworkFunction {
public:
Sigmoid(){};
virtual ~Sigmoid(){};
virtual double Process( double inParam ){ return ( 1 / ( 1 + exp( -inParam ) ) ); };
virtual double Derivative( double inParam ){ return ( this->Process(inParam)*(1 - this->Process(inParam)) );};
};
class BipolarSigmoid : public NetworkFunction {
public:
BipolarSigmoid(){};
virtual ~BipolarSigmoid(){};
virtual double Process( double inParam ){ return ( 2 / ( 1 + exp( -inParam ) ) - 1 ) ;};
virtual double Derivative( double inParam ){ return ( 0.5 * ( 1 + this->Process( inParam ) ) * ( 1 - this->Process( inParam ) ) ); };
};
За производство нейронов ответственна нейронная фабрика:
Интерфейс нейронной фабрики
template <typename T>
class NeuronFactory
{
public:
NeuronFactory(){};
virtual ~NeuronFactory(){};
virtual Neuron<T> * CreateInputNeuron( std::vector<Neuron<T > *>& inNeuronsLinkTo, NetworkFunction * inNetFunc ) = 0;
virtual Neuron<T> * CreateOutputNeuron( NetworkFunction * inNetFunc ) = 0;
virtual Neuron<T> * CreateHiddenNeuron( std::vector<Neuron<T > *>& inNeuronsLinkTo, NetworkFunction * inNetFunc ) = 0;
};
template <typename T>
class PerceptronNeuronFactory : public NeuronFactory<T>
{
public:
PerceptronNeuronFactory(){};
virtual ~PerceptronNeuronFactory(){};
virtual Neuron<T> * CreateInputNeuron( std::vector<Neuron<T > *>& inNeuronsLinkTo, NetworkFunction * inNetFunc ){ return new Neuron<T>( inNeuronsLinkTo, inNetFunc ); };
virtual Neuron<T> * CreateOutputNeuron( NetworkFunction * inNetFunc ){ return new OutputLayerNeuronDecorator<T>( new Neuron<T>( inNetFunc ) ); };
virtual Neuron<T> * CreateHiddenNeuron( std::vector<Neuron<T > *>& inNeuronsLinkTo, NetworkFunction * inNetFunc ){ return new HiddenLayerNeuronDecorator<T>( new Neuron<T>( inNeuronsLinkTo, inNetFunc ) ); };
};
Сама нейронная сеть хранит указатели на нейроны, организованные
слоями ( вообще, указатели на нейроны хранятся в векторах, которые
нужно заменить на объекты-слои ), включает в себя абстрактную
фабрику нейронов, а также алгоритм обучения сети.
Интерфейс нейронной сети
template <typename T>
class TrainAlgorithm;
/**
* Neural network class.
* An object of that type represents a neural network of several types:
* - Single layer perceptron;
* - Multiple layers perceptron.
*
* There are several training algorithms available as well:
* - Perceptron;
* - Backpropagation.
*
* How to use this class:
* To be able to use neural network , you have to create an instance of that class, specifying
* a number of input neurons, output neurons, number of hidden layers and amount of neurons in hidden layers.
* You can also specify a type of neural network, by passing a string with a name of neural network, otherwise
* MultiLayerPerceptron will be used. ( A training algorithm can be changed via public calls);
*
* Once the neural network was created, all u have to do is to set the biggest MSE required to achieve during
* the training phase ( or u can skip this step, then mMinMSE will be set to 0.01 ),
* train the network by providing a training data with target results.
* Afterwards u can obtain the net response by feeding the net with data;
*
*/
template <typename T>
class NeuralNetwork
{
public:
/**
* A Neural Network constructor.
* - Description: A template constructor. T is a data type, all the nodes will operate with. Create a neural network by providing it with:
* @param inInputs - an integer argument - number of input neurons of newly created neural network;
* @param inOutputs- an integer argument - number of output neurons of newly created neural network;
* @param inNumOfHiddenLayers - an integer argument - number of hidden layers of newly created neural network, default is 0;
* @param inNumOfNeuronsInHiddenLayers - an integer argument - number of neurons in hidden layers of newly created neural network ( note that every hidden layer has the same amount of neurons), default is 0;
* @param inTypeOfNeuralNetwork - a const char * argument - a type of neural network, we are going to create. The values may be:
* <UL>
* <LI>MultiLayerPerceptron;</LI>
* <LI>Default is MultiLayerPerceptron.</LI>
* </UL>
* - Purpose: Creates a neural network for solving some interesting problems.
* - Prerequisites: The template parameter has to be picked based on your input data.
*
*/
NeuralNetwork( const int& inInputs,
const int& inOutputs,
const int& inNumOfHiddenLayers = 0,
const int& inNumOfNeuronsInHiddenLayers = 0,
const char * inTypeOfNeuralNetwork = "MultiLayerPerceptron"
);
~NeuralNetwork( );
/**
* Public method Train.
* - Description: Method for training the network.
* - Purpose: Trains a network, so the weights on the links adjusted in the way to be able to solve problem.
* - Prerequisites:
* @param inData - a vector of vectors with data to train with;
* @param inTarget - a vector of vectors with target data;
* - the number of data samples and target samples has to be equal;
* - the data and targets has to be in the appropriate order u want the network to learn.
*/
bool Train( const std::vector<std::vector<T > >& inData,
const std::vector<std::vector<T > >& inTarget );
/**
* Public method GetNetResponse.
* - Description: Method for actually get response from net by feeding it with data.
* - Purpose: By calling this method u make the network evaluate the response for u.
* - Prerequisites:
* @param inData - a vector data to feed with.
*/
std::vector<int> GetNetResponse( const std::vector<T>& inData );
/**
* Public method SetAlgorithm.
* - Description: Setter for algorithm of training the net.
* - Purpose: Can be used for dynamic change of training algorithm.
* - Prerequisites:
* @param inTrainingAlgorithm - an existence of already created object of type TrainAlgorithm.
*/
void SetAlgorithm( TrainAlgorithm<T> * inTrainingAlgorithm ) { mTrainingAlgoritm = inTrainingAlgorithm; };
/**
* Public method SetNeuronFactory.
* - Description: Setter for the factory, which is making neurons for the net.
* - Purpose: Can be used for dynamic change of neuron factory.
* - Prerequisites:
* @param inNeuronFactory - an existence of already created object of type NeuronFactory.
*/
void SetNeuronFactory( NeuronFactory<T> * inNeuronFactory ) { mNeuronFactory = inNeuronFactory; };
/**
* Public method ShowNetworkState.
* - Description: Prints current state to the standard output: weight of every link.
* - Purpose: Can be used for monitoring the weights change during training of the net.
* - Prerequisites: None.
*/
void ShowNetworkState( );
/**
* Public method GetMinMSE.
* - Description: Returns the biggest MSE required to achieve during the training phase.
* - Purpose: Can be used for getting the biggest MSE required to achieve during the training phase.
* - Prerequisites: None.
*/
const double& GetMinMSE( ){ return mMinMSE; };
/**
* Public method SetMinMSE.
* - Description: Setter for the biggest MSE required to achieve during the training phase.
* - Purpose: Can be used for setting the biggest MSE required to achieve during the training phase.
* - Prerequisites:
* @param inMinMse - double value, the biggest MSE required to achieve during the training phase.
*/
void SetMinMSE( const double& inMinMse ){ mMinMSE = inMinMse; };
/**
* Friend class.
*/
friend class Hebb<T>;
/**
* Friend class.
*/
friend class Backpropagation<T>;
protected:
/**
* Protected method GetLayer.
* - Description: Getter for the layer by index of that layer.
* - Purpose: Can be used by inner implementation for getting access to neural network's layers.
* - Prerequisites:
* @param inInd - an integer index of layer.
*/
std::vector<Neuron<T > *>& GetLayer( const int& inInd ){ return mLayers[inInd]; };
/**
* Protected method size.
* - Description: Returns the number of layers in the network.
* - Purpose: Can be used by inner implementation for getting number of layers in the network.
* - Prerequisites: None.
*/
unsigned int size( ){ return mLayers.size( ); };
/**
* Protected method GetNumOfOutputs.
* - Description: Returns the number of units in the output layer.
* - Purpose: Can be used by inner implementation for getting number of units in the output layer.
* - Prerequisites: None.
*/
std::vector<Neuron<T > *>& GetOutputLayer( ){ return mLayers[mLayers.size( )-1]; };
/**
* Protected method GetInputLayer.
* - Description: Returns the input layer.
* - Purpose: Can be used by inner implementation for getting the input layer.
* - Prerequisites: None.
*/
std::vector<Neuron<T > *>& GetInputLayer( ){ return mLayers[0]; };
/**
* Protected method GetBiasLayer.
* - Description: Returns the vector of Biases.
* - Purpose: Can be used by inner implementation for getting vector of Biases.
* - Prerequisites: None.
*/
std::vector<Neuron<T > *>& GetBiasLayer( ) { return mBiasLayer; };
/**
* Protected method UpdateWeights.
* - Description: Updates the weights of every link between the neurons.
* - Purpose: Can be used by inner implementation for updating the weights of links between the neurons.
* - Prerequisites: None, but only makes sense, when its called during the training phase.
*/
void UpdateWeights( );
/**
* Protected method ResetCharges.
* - Description: Resets the neuron's data received during iteration of net training.
* - Purpose: Can be used by inner implementation for reset the neuron's data between iterations.
* - Prerequisites: None, but only makes sense, when its called during the training phase.
*/
void ResetCharges( );
/**
* Protected method AddMSE.
* - Description: Changes MSE during the training phase.
* - Purpose: Can be used by inner implementation for changing MSE during the training phase.
* - Prerequisites:
* @param inInd - a double amount of MSE to be add.
*/
void AddMSE( double inPortion ){ mMeanSquaredError += inPortion; };
/**
* Protected method GetMSE.
* - Description: Getter for MSE value.
* - Purpose: Can be used by inner implementation for getting access to the MSE value.
* - Prerequisites: None.
*/
double GetMSE( ){ return mMeanSquaredError; };
/**
* Protected method ResetMSE.
* - Description: Resets MSE value.
* - Purpose: Can be used by inner implementation for resetting MSE value.
* - Prerequisites: None.
*/
void ResetMSE( ) { mMeanSquaredError = 0; };
NeuronFactory<T> * mNeuronFactory; /*!< Member, which is responsible for creating neurons @see SetNeuronFactory */
TrainAlgorithm<T> * mTrainingAlgoritm; /*!< Member, which is responsible for the way the network will trained @see SetAlgorithm */
std::vector<std::vector<Neuron<T > *> > mLayers; /*!< Inner representation of neural networks */
std::vector<Neuron<T > *> mBiasLayer; /*!< Container for biases */
unsigned int mInputs, mOutputs, mHidden; /*!< Number of inputs, outputs and hidden units */
double mMeanSquaredError; /*!< Mean Squared Error which is changing every iteration of the training*/
double mMinMSE; /*!< The biggest Mean Squared Error required for training to stop*/
};
И, наконец, сам интерфейс класса, ответственного за обучение сети:
Интерфейс алгоритма обучения
template <typename T>
class NeuralNetwork;
template <typename T>
class TrainAlgorithm
{
public:
virtual ~TrainAlgorithm(){};
virtual double Train(const std::vector<T>& inData, const std::vector<T>& inTarget) = 0;
virtual void WeightsInitialization() = 0;
protected:
};
template <typename T>
class Hebb : public TrainAlgorithm<T>
{
public:
Hebb(NeuralNetwork<T> * inNeuralNetwork) : mNeuralNetwork(inNeuralNetwork){};
virtual ~Hebb(){};
virtual double Train(const std::vector<T>& inData, const std::vector<T>& inTarget);
virtual void WeightsInitialization();
protected:
NeuralNetwork<T> * mNeuralNetwork;
};
template <typename T>
class Backpropagation : public TrainAlgorithm<T>
{
public:
Backpropagation(NeuralNetwork<T> * inNeuralNetwork);
virtual ~Backpropagation(){};
virtual double Train(const std::vector<T>& inData, const std::vector<T>& inTarget);
virtual void WeightsInitialization();
protected:
void NguyenWidrowWeightsInitialization();
void CommonInitialization();
NeuralNetwork<T> * mNeuralNetwork;
};
Весь код доступен на github: Sovietmade/NeuralNetworks
В качестве заключения, хотелось бы отметить, что тема нейронных сетей на данный момент не разработана полностью, вновь и вновь мы видим на страницах хабра упоминания о новых достижениях ученых в области нейронных сетей, новых удивительных разработках. С моей стороны,
эта статья была первым шагом освоения интереснейшей технологии, и я надеюсь для кого — то она окажется небесполезной.
Использованная литература:
Алгоритм обучения нейронной сети был взят из изумительной книги:
Laurene V. Fausett “Fundamentals of Neural Networks: Architectures, Algorithms And Applications”.
В первой части были рассмотрены: структура, топология, функции активации и обучающее множество. В этой части попробую объяснить как происходит обучение сверточной нейронной сети.
Обучение сверточной нейронной сети
На начальном этапе нейронная сеть является необученной (ненастроенной). В общем смысле под обучением понимают последовательное предъявление образа на вход нейросети, из обучающего набора, затем полученный ответ сравнивается с желаемым выходом, в нашем случае это 1 – образ представляет лицо, минус 1 – образ представляет фон (не лицо), полученная разница между ожидаемым ответом и полученным является результат функции ошибки (дельта ошибки). Затем эту дельту ошибки необходимо распространить на все связанные нейроны сети.
Таким образом обучение нейронной сети сводится к минимизации функции ошибки, путем корректировки весовых коэффициентов синаптических связей между нейронами. Под функцией ошибки понимается разность между полученным ответом и желаемым. Например, на вход был подан образ лица, предположим, что выход нейросети был 0.73, а желаемый результат 1 (т.к. образ лица), получим, что ошибка сети является разницей, то есть 0.27. Затем веса выходного слоя нейронов корректируются в соответствии с ошибкой. Для нейронов выходного слоя известны их фактические и желаемые значения выходов. Поэтому настройка весов связей для таких нейронов является относительно простой. Однако для нейронов предыдущих слоев настройка не столь очевидна. Долгое время не было известно алгоритма распространения ошибки по скрытым слоям.
Алгоритм обратного распространения ошибки
Для обучения описанной нейронной сети был использован алгоритм обратного распространения ошибки (backpropagation). Этот метод обучения многослойной нейронной сети называется обобщенным дельта-правилом. Метод был предложен в 1986 г. Румельхартом, Макклеландом и Вильямсом. Это ознаменовало возрождение интереса к нейронным сетям, который стал угасать в начале 70-х годов. Данный алгоритм является первым и основным практически применимым для обучения многослойных нейронных сетей.
Для выходного слоя корректировка весов интуитивна понятна, но для скрытых слоев долгое время не было известно алгоритма. Веса скрытого нейрона должны изменяться прямо пропорционально ошибке тех нейронов, с которыми данный нейрон связан. Вот почему обратное распространение этих ошибок через сеть позволяет корректно настраивать веса связей между всеми слоями. В этом случае величина функции ошибки уменьшается и сеть обучается.
Основные соотношения метода обратного распространения ошибки получены при следующих обозначениях:
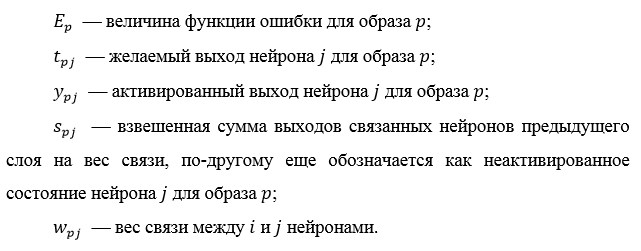
Величина ошибки определяется по формуле 2.8 среднеквадратичная ошибка:

Неактивированное состояние каждого нейрона j для образа p записывается в виде взвешенной суммы по формуле 2.9:
Выход каждого нейрона j является значением активационной функции
 , которая переводит нейрон в активированное состояние. В качестве функции активации может использоваться любая непрерывно дифференцируемая монотонная функция. Активированное состояние нейрона вычисляется по формуле 2.10:
, которая переводит нейрон в активированное состояние. В качестве функции активации может использоваться любая непрерывно дифференцируемая монотонная функция. Активированное состояние нейрона вычисляется по формуле 2.10:

В качестве метода минимизации ошибки используется метод градиентного спуска, суть этого метода сводится к поиску минимума (или максимума) функции за счет движения вдоль вектора градиента. Для поиска минимума движение должно быть осуществляться в направлении антиградиента. Метод градиентного спуска в соответствии с рисунком 2.7.

Градиент функции потери представляет из себя вектор частных производных, вычисляющийся по формуле 2.11:
Производную функции ошибки по конкретному образу можно записать по правилу цепочки, формула 2.12:

Ошибка нейрона  обычно записывается в виде символа δ (дельта). Для выходного слоя ошибка определена в явном виде, если взять производную от формулы 2.8, то получим t минус y, то есть разницу между желаемым и полученным выходом. Но как рассчитать ошибку для скрытых слоев? Для решения этой задачи, как раз и был придуман алгоритм обратного распространения ошибки. Суть его заключается в последовательном вычислении ошибок скрытых слоев с помощью значений ошибки выходного слоя, т.е. значения ошибки распространяются по сети в обратном направлении от выхода к входу.
обычно записывается в виде символа δ (дельта). Для выходного слоя ошибка определена в явном виде, если взять производную от формулы 2.8, то получим t минус y, то есть разницу между желаемым и полученным выходом. Но как рассчитать ошибку для скрытых слоев? Для решения этой задачи, как раз и был придуман алгоритм обратного распространения ошибки. Суть его заключается в последовательном вычислении ошибок скрытых слоев с помощью значений ошибки выходного слоя, т.е. значения ошибки распространяются по сети в обратном направлении от выхода к входу.
Ошибка δ для скрытого слоя рассчитывается по формуле 2.13:
Алгоритм распространения ошибки сводится к следующим этапам:
- прямое распространение сигнала по сети, вычисления состояния нейронов;
- вычисление значения ошибки δ для выходного слоя;
- обратное распространение: последовательно от конца к началу для всех скрытых слоев вычисляем δ по формуле 2.13;
- обновление весов сети на вычисленную ранее δ ошибки.
Алгоритм обратного распространения ошибки в многослойном персептроне продемонстрирован ниже:
До этого момента были рассмотрены случаи распространения ошибки по слоям персептрона, то есть по выходному и скрытому, но помимо них, в сверточной нейросети имеются подвыборочный и сверточный.
Расчет ошибки на подвыборочном слое
Расчет ошибки на подвыборочном слое представляется в нескольких вариантах. Первый случай, когда подвыборочный слой находится перед полносвязным, тогда он имеет нейроны и связи такого же типа, как в полносвязном слое, соответственно вычисление δ ошибки ничем не отличается от вычисления δ скрытого слоя. Второй случай, когда подвыборочный слой находится перед сверточным, вычисление δ происходит путем обратной свертки. Для понимания обратно свертки, необходимо сперва понять обычную свертку и то, что скользящее окно по карте признаков (во время прямого распространения сигнала) можно интерпретировать, как обычный скрытый слой со связями между нейронами, но главное отличие — это то, что эти связи разделяемы, то есть одна связь с конкретным значением веса может быть у нескольких пар нейронов, а не только одной. Интерпретация операции свертки в привычном многослойном виде в соответствии с рисунком 2.8.
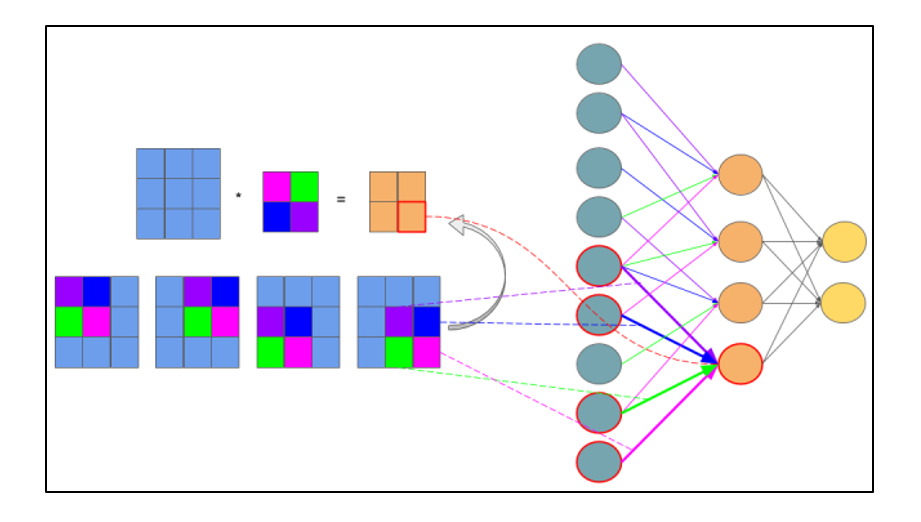
Рисунок 2.8 — Интерпретация операции свертки в многослойный вид, где связи с одинаковым цветом имеют один и тот же вес. Синим цветом обозначена подвыборочная карта, разноцветным – синаптическое ядро, оранжевым – получившаяся свертка
Теперь, когда операция свертки представлена в привычном многослойном виде, можно интуитивно понять, что вычисление дельт происходит таким же образом, как и в скрытом слое полносвязной сети. Соответственно имея вычисленные ранее дельты сверточного слоя можно вычислить дельты подвыборочного, в соответствии с рисунком 2.9.
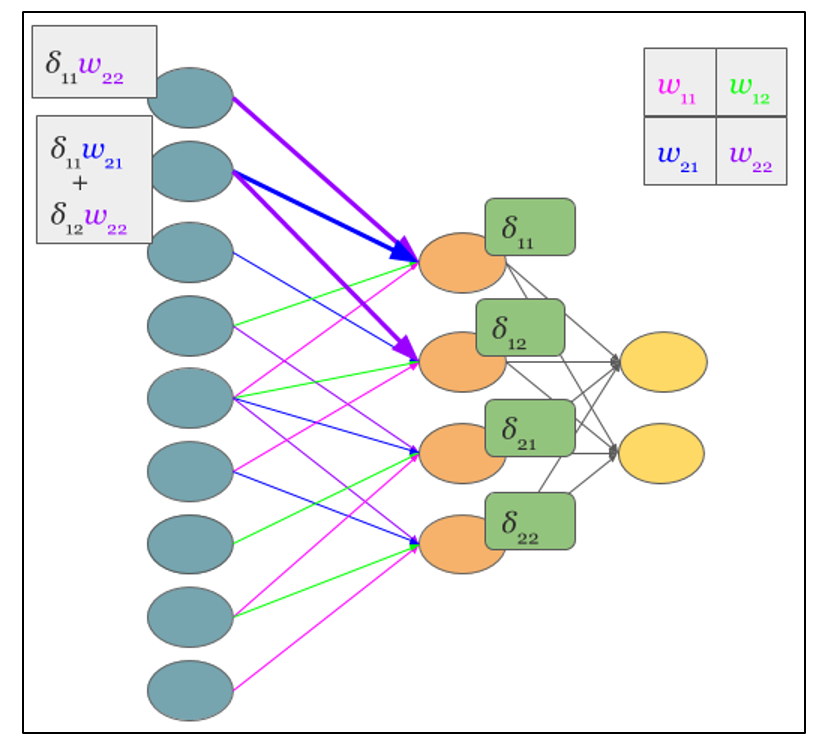
Рисунок 2.9 — Вычисление δ подвыборочного слоя за счет δ сверточного слоя и ядра
Обратная свертка – это тот же самый способ вычисления дельт, только немного хитрым способом, заключающийся в повороте ядра на 180 градусов и скользящем процессе сканирования сверточной карты дельт с измененными краевыми эффектами. Простыми словами, нам необходимо взять ядро сверточной карты (следующего за подвыборочным слоем) повернуть его на 180 градусов и сделать обычную свертку по вычисленным ранее дельтам сверточной карты, но так чтобы окно сканирования выходило за пределы карты. Результат операции обратной свертки в соответствии с рисунком 2.10, цикл прохода обратной свертки в соответствии с рисунком 2.11.

Рисунок 2.10 — Результат операции обратной свертки
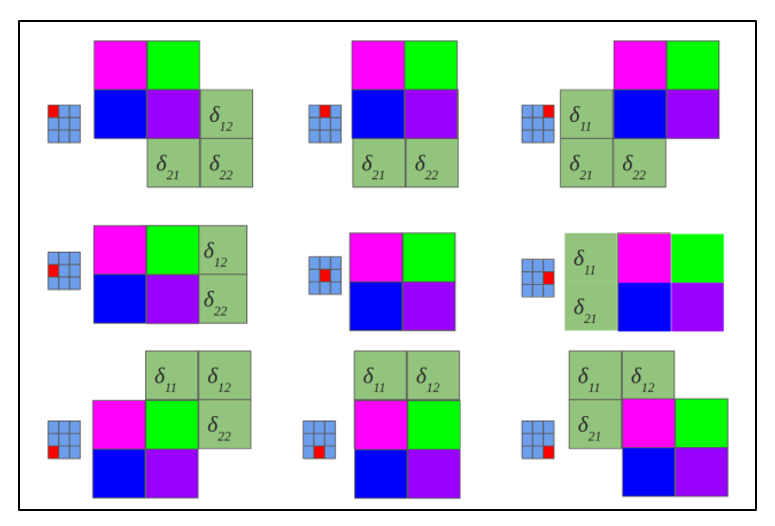
Рисунок 2.11 — Повернутое ядро на 180 градусов сканирует сверточную карту
Расчет ошибки на сверточном слое
Обычно впередиидущий слой после сверточного это подвыборочный, соответственно наша задача вычислить дельты текущего слоя (сверточного) за счет знаний о дельтах подвыборочного слоя. На самом деле дельта ошибка не вычисляется, а копируется. При прямом распространении сигнала нейроны подвыборочного слоя формировались за счет неперекрывающегося окна сканирования по сверточному слою, в процессе которого выбирались нейроны с максимальным значением, при обратном распространении, мы возвращаем дельту ошибки тому ранее выбранному максимальному нейрону, остальные же получают нулевую дельту ошибки.
Заключение
Представив операцию свертки в привычном многослойном виде (рисунок 2.8), можно интуитивно понять, что вычисление дельт происходит таким же образом, как и в скрытом слое полносвязной сети.
Источники
Алгоритм обратного распространения ошибки для сверточной нейронной сети
Обратное распространение ошибки в сверточных слоях
раз и два
Обратное распространение ошибки в персептроне
Еще можно почитать в РГБ диссертацию Макаренко: АЛГОРИТМЫ И ПРОГРАММНАЯ СИСТЕМА КЛАССИФИКАЦИИ
Поскольку я столкнулся с существенными затруднениями в поисках объяснения механизма обратного распространения ошибки, которое мне понравилось бы, я решил написать собственный пост об обратном распространении ошибки реализовав алгоритм Word2Vec. Моя цель, — объяснить сущность алгоритма, используя простую, но нетривиальную нейросеть. Кроме того, word2vec стал настолько популярным в NLP сообществе, что будет полезно сосредоточиться на нем.
Данный пост связан с другим, более практическим постом который рекомендую прочитать, в нем рассматривается непосредственная реализация word2vec на языке python. В данном же посте мы сосредоточимся в основном на теоретической части.
Начнем с вещей которые необходимы для настоящего понимания обратного распространения. Помимо понятий из машинного обучения, таких как, функция потерь и градиентный спуск, пригодятся еще два компонента из математики:
- линейная алгебра (в частности матричное умножение)
- правило цепочки дифференцирования функций от многих переменных
Если вам знакомы эти понятия, то дальнейшие рассуждения окажутся простыми. Если же вы еще не освоили их, то все равно сможете понять основы обратного распространения.
Сперва я хочу дать определение понятию обратного распространения, если смысл будет недостаточно понятен, он будет раскрыт подробнее в следующих пунктах.
1. Что такое алгоритм обратного распространения
В рамках нейронной сети, единственными параметрами участвующими в обучении сети, то есть минимизации функции потерь, являются веса (здесь имею в виду веса в широком смысле, относя к ним и смещения). Веса изменяются на каждой итерации, пока мы не приблизимся к минимуму функции потерь.
В таком контексте, обратное распространение — это эффективный алгоритм нахождения оптимальных весов нейронной сети, то есть тех, которые оптимизируют функцию потерь.
Стандартный способ нахождения этих весов, применение алгоритма градиентного спуска, который подразумевает нахождение частных производных функции потерь по всем весам.
Для тривиальных задач в которых всего две переменных, легко представить как работает градиентный спуск, если вы посмотрите на рисунок, то увидите трехмерный график функции потерь, как функции весов w1 и w2.

Рисунок 1. Визуальное объяснение алгоритма градиентного спуска.
Вначале мы не знаем оптимальные значения, то есть не знаем какие значения w1 и w2 минимизируют функцию потерь.
Допустим, мы начинаем с красной точки. Если мы знаем как изменяется функция потерь при изменении весов, то есть если мы знаем производные  и
и  , то мы можем сдвинуть красную точку ближе к минимуму функции потерь, которая представлена на графике синей точкой. Шаг сдвига определяется параметром
, то мы можем сдвинуть красную точку ближе к минимуму функции потерь, которая представлена на графике синей точкой. Шаг сдвига определяется параметром  , который обычно называется параметром обучения.
, который обычно называется параметром обучения.
2. Word2Vec
Задача алгоритма word2vec, найти эмбеддинги слов в заданном текстовом корпусе, другими словами, это методика поиска представлений слов в низкой размерности. Как следствие, когда мы говорим о word2vec, мы обычно говорим о приложениях NLP.
Например, модель word2vec обученная со скрытым слоем размерности [N, 3], где N -количество слов в словаре, даст трехмерные эмбеддинги слов. Это значит что, например, слово ‘квартира’, будет представлено трехмерным вектором действительных чисел, который будет близок (воспринимайте это как Евклидову метрику), к представлению аналогичного слова, такого как ‘дом’. Другими словами, word2vec это техника отображения слов в числа.
В контексте word2vec используются две основные модели: мешок слов (CBOW) и скипграммы (skip-gram). Сначала мы рассмотрим простейшую модель, CBOW, с окном из одного слова, затем перейдем к окну из нескольких слов и наконец рассмотрим модель skip-gram.
По мере продвижения я покажу несколько небольших примеров с текстом состоящим всего из нескольких слов. Однако имейте в виду, что обычно woed2vec тренируется с миллиардами слов.
3. Простая модель CBOW
В CBOW модели задача состоит в поиске слова по его контексту. В простейшем случае когда контекст слова представлен одним словом, нейронная сеть будет выглядеть так:

Рисунок 2. Топология модели Continuous Bag-of-Words модели с контекстом из одного слова
Один входной слой, один скрытый слой и выходной слой, функция активации скрытого слоя
a = 1 (identity function, или функция линейной активации, хотя последнее неправильно).
В качестве функции активации выходного слоя используется Softmax.
Входной слой представлен one hot encoding вектором, длина которого совпадает с размером массива слов, все элементы данного вектора равны нулю, кроме элементов, индексы которых совпадают с индексами слов из контекста, по данным индексам значения вектора равны 1.
Пример: словарь [‘мама’, ‘мыла’, ‘раму’, ‘маша’, ‘ела’, ‘кашу’]
OneHot(‘маша’) = [0, 0, 0, 1, 0, 0]
OneHot([‘мама’, ‘маша’]) = [1, 0, 0, 1, 0, 0]
OneHot([‘мама’, ‘ела’, ‘кашу’]) = [1, 0, 0, 0, 1, 1]
Перейдем к весам, весовые коэффициенты между входным и скрытым слоем представлены матрицей W размера  , матрица между скрытым и выходным слоем
, матрица между скрытым и выходным слоем  размером
размером  , где V — размер словаря, N — размер эмбеддинг вектора (то есть, те вектора которые и пытается найти word2vec)
, где V — размер словаря, N — размер эмбеддинг вектора (то есть, те вектора которые и пытается найти word2vec)
Выходной вектор y сравниваем с ожидаемым вектором t, чем они ближе, тем выше эффективность нейронной сети, и, соответственно, меньше функция потерь.
Если на текущем этапе что то звучит непонятно, то пример ниже должен прояснить ситуацию.
Пример
Предположим, мы хотим обучить word2vec следующим текстом:
«I like playing football»
Мы решаем обучить модель CBOW с одним контекстным словом как на рисунке (2) выше.
Учитывая текст который у нас есть, наш словарь будет состоять из 4 слов, соответственно V=4, также установим что скрытый слой будет иметь два нейрона, то есть N=2, наша нейросеть будет выглядеть так:

Со словарём:
![$textrm{Vocabulary}=[textrm{“I”}, textrm{“like”}, textrm{“playing”}, textrm{“football”}]$](https://habrastorage.org/getpro/habr/formulas/f41/b67/718/f41b67718ee43b9e0cec668116703326.svg)
Далее мы определяем как выбирать ‘целевое’ и ‘контекстное’ слово, и мы можем построить наши обучающие примеры двигаясь окном по тексту. Например:

Тогда обучающие примеры будут выглядеть так:
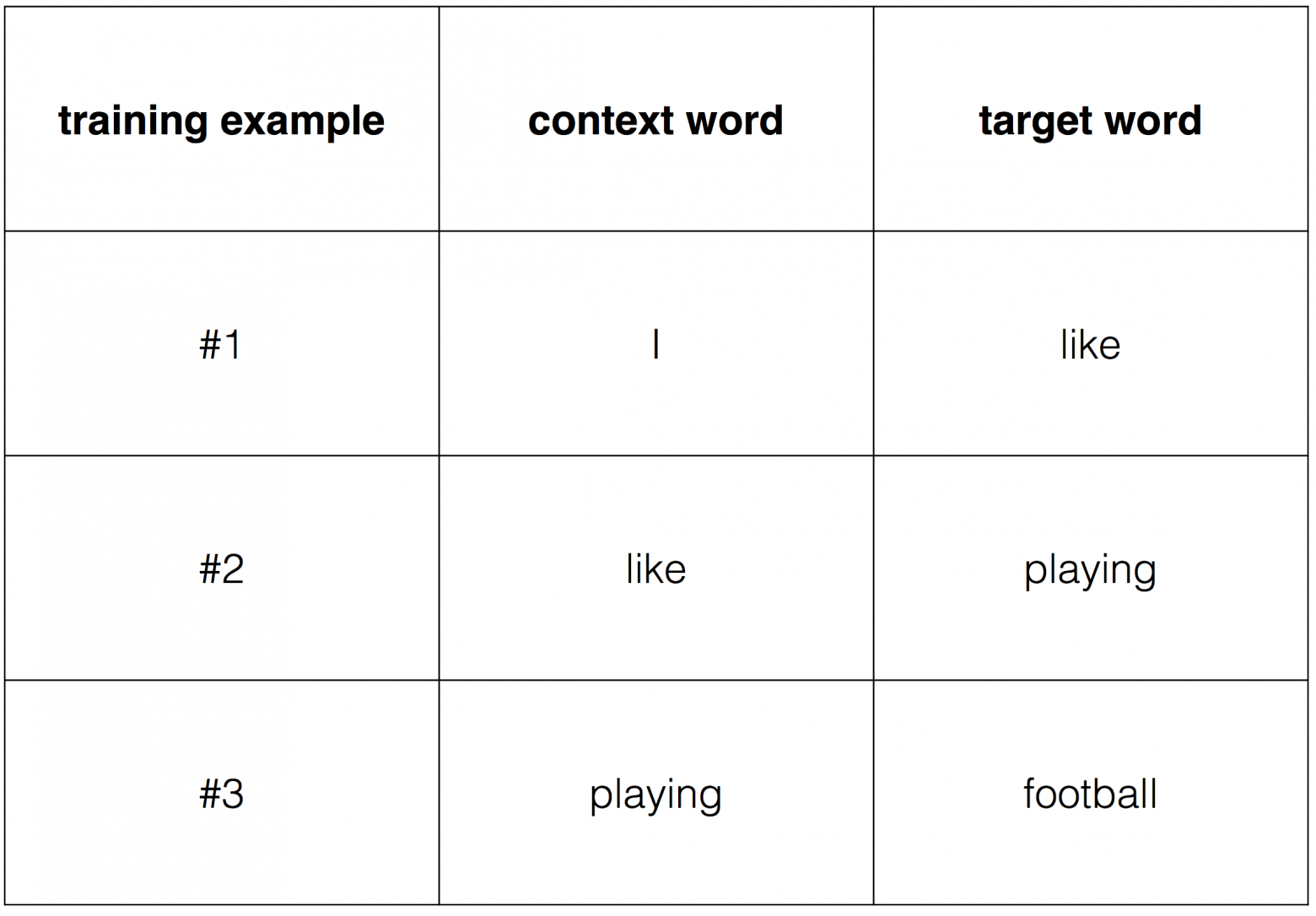
Чтобы передать эти данные в алгоритм понадобится преобразовать их в числа, для чего используем one-hot encoding.

На данный момент, мы хотим обучить нашу модель, находя веса, которые минимизируют функцию потерь. Это соответствует нахождению весов, которые с учетом вектора контекста могут с высокой точностью предсказать, что является соответствующим целевым словом.
3.1 Функция потерь (Loss function)
Исходя из топологии на рисунке 1, давайте запишем как посчитать значения скрытого и выходного слоев, при входе x:

где, h — сумма на скрытом слое, u — сумма на выходном слое, y — выход сети.
Теперь, предположим, мы обучаем модель по паре целевое слово, контекстное слово (wt, wc). Целевое слово представляет собой идеальное предсказание нейронной сети, в виде onehot encoding вектора.
Функция потерь должна будет оценить выходной слой, относительно onehot вектора wt (целевого слова).
Поскольку значения softmax можно интерпретировать как условные вероятности целевого слова, то учитывая контекстное слово функцию потерь можно записать в следующем виде:
![$begin{equation*} mathcal{L} = -log mathbb{P}(w_t|w_c)=-log y_{j^*} =-log[mathbb{S}textrm{oftmax}(u_{j^*})]=-logleft(frac{exp{u_{j^*}}}{sum_i exp{u_i}}right), end{equation*}$](https://habrastorage.org/getpro/habr/formulas/f40/283/a15/f40283a15a0b3d0809da06ed263ccf64.svg)
, где j* — ожидаемая позиция правильно предсказанного слова.
Добавление функции логарифма является стандартным подходом. Из данного выражения мы получаем уравнение (1):
![$begin{equation} bbox[lightblue,5px,border:2px solid red]{ mathcal{L} = -u_{j^*} + log sum_i exp{(u_i)}. } label{eq:loss} end{equation} >(1)$](https://habrastorage.org/getpro/habr/formulas/0d0/ece/9f3/0d0ece9f36940c9a0e7fc06b394c4cdc.svg)
Функция потерь максимизирует вероятность предсказания правильного слова исходя из заданного контекста.
Пример
Вернемся к предыдущему примеру предложения «I like play football», предположим мы обучаем модель по первой записи обучающих данных, с контекстным словом «I» и целевым словом «like», в идеале веса сети должны быть такими, чтобы при вводе  — что соответствует слову «I», результат работы был близок к
— что соответствует слову «I», результат работы был близок к  , что соответствует слову «like».
, что соответствует слову «like».
Стандартный подход к инициализации весов word2vec, использование нормального распределения. Примем начальное состояние весов матрицы W размером 

И начальное состояние весов матрицы размером 

Для обучающих данных «I like» мы получаем:

Затем

И наконец

На этом этапе функция потерь будет отрицательным логарифмом второго элемента  , или
, или

Также, мы могли бы рассчитать ее при помощи уравнения (1):
![$begin{eqnarray*} mathcal{L}=-u_2+logsum_{i=1}^4 u_i=-1.10720623 + log[exp(-1.54350765)+exp(1.10720623) \ +exp(-1.25885456)+exp(-0.61514042)]=0.2949781. end{eqnarray*}$](https://habrastorage.org/getpro/habr/formulas/e15/ace/8b5/e15ace8b5cb5c23b1466c9e168c9626a.svg)
Теперь, прежде чем перейти к следующему обучающему примеру «like play», мы должны изменить веса нейросети, как это сделать расскажет следующий пункт про обратное распространение.
3.2 Алгоритм обратного распространения для модели CBOW
Теперь, имея в наличии функцию потерь, мы хотим найти веса W и W` которые ее минимизируют. В терминах машинного обучения, мы хотим чтобы модель обучилась.
В первом разделе мы уже обсудили что в мире нейронный сетей эта проблема решается использованием градиентного спуска. На рисунке (1) показано как применить этот метод и обновить матрицы весов W и W`. Нам нужно найти производные  и
и 
Я считаю что самый простой способ понять как это сделать, это записать соотношения между функцией потерь и матрицами весов. Глядя на уравнение (1) ясно что функция потерь зависит от весов W и W`, через переменную u=[u1, …., uV], или

Получить производные можно из правила цепочки для функций многих переменных:

и

И это большая часть алгоритма обратного распространения, на данный момент нам просто нужно определить уравнения (2) и (3) для нашего случая.
Начнем с уравнения (2), обратите внимание что вес Wij, относится к матрице W, и соединяет нейрон i в скрытом слое с нейроном j в выходном слое, и соответственно оказывает влияние только на выход uj (соответственно и на yj).
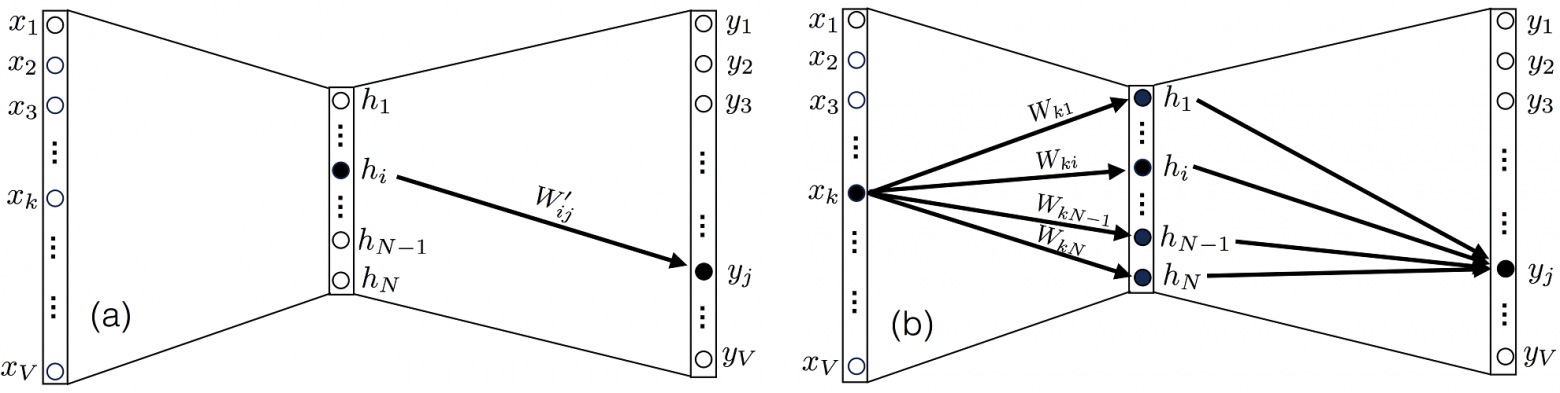
Рисунок 3. (a) Выходной узел  зависит от общего узла
зависит от общего узла  скрытого слоя только через элемент
скрытого слоя только через элемент  матрицы . (b) Но кроме того, этот же выходной узел зависит от общего входного узла
матрицы . (b) Но кроме того, этот же выходной узел зависит от общего входного узла  через N элементов
через N элементов  матрицы W.
матрицы W.
Следовательно, среди всех производных  , только одна, где k=j, будет отличаться от 0.
, только одна, где k=j, будет отличаться от 0.
Уравнение (4):

Давайте посчитаем  , уравнение (5):
, уравнение (5):

, где  — дельта Кронекера, функция двух целых переменных, которая равна 1, если они равны, и 0 в противном случае.
— дельта Кронекера, функция двух целых переменных, которая равна 1, если они равны, и 0 в противном случае.
В уравнении (5) мы ввели вектор e размерности N (размер словаря), который мы используем чтобы снизить сложность обозначений, этот вектор представляет собой разницу между полученным и ожидаемым результатом, то есть это вектор ошибок предсказания.
Для второго члена правой части уравнения (4) мы получим уравнения (6):

После подставновки уравнений (5) и (6) в уравнение (4) мы получим уравнение (7):
![$begin{equation} bbox[white,5px,border:2px dotted red]{ frac{partialmathcal{L}}{partial W'_{ij}} = (-delta_{jj^*} + y_j) left(sum_{k=1}^V W_{ki}x_kright) } label{eq:backprop1} end{equation} >(7)$](https://habrastorage.org/getpro/habr/formulas/803/9aa/fc9/8039aafc9366442fea22e47a2749a322.svg)
Мы можем найти выполнить аналогичное упражнение для поиска производной  , однако на этот раз отметим что после задания входа Xk, выход yj нейрона j зависит от всех элементов матрицы W соединенных со входом, как видно на рисунке 3(b). Поэтому мы должны оценивать все элементы в сумме. Прежде чем перейти к оценке
, однако на этот раз отметим что после задания входа Xk, выход yj нейрона j зависит от всех элементов матрицы W соединенных со входом, как видно на рисунке 3(b). Поэтому мы должны оценивать все элементы в сумме. Прежде чем перейти к оценке  , полезно перезаписать выражение для элемента uk из вектора u как:
, полезно перезаписать выражение для элемента uk из вектора u как:

Из этого уравнения легко вывести , поскольку единственный выживший член производной будет с индексами l=i и m=j, или же в виде уравнения (8):

Наконец применив уравнения (5) и (8) мы получим результат, уравнение (9):
![$begin{equation} bbox[white,5px,border:2px dotted red]{ frac{partial mathcal{L}}{partial W_{ij}} = sum_{k=1}^V (-delta_{kk^*}+y_k)W'_{jk}x_i } label{eq:backprop2} end{equation} >(9)$](https://habrastorage.org/getpro/habr/formulas/418/03a/a32/41803aa32556cf4a26ad865d3d158821.svg)
Векторизация
Мы можем упростить запись уравнений. (7) и (9) используя векторную нотацию. Сделав это мы получим для уравнения (7)
![$begin{equation} bbox[white,5px,border:2px dotted red]{ frac{partialmathcal{L}}{partial W'} = (W^Ttextbf{x}) otimes textbf{e} } end{equation} >(10)$](https://habrastorage.org/getpro/habr/formulas/d44/92d/681/d4492d68186efeb772d71cb396c24da8.svg)
Где символ ⊗ обозначает векторное произведение.
Для уравнения (9) мы получим:
![$begin{equation} bbox[white,5px,border:2px dotted red]{ frac{partial mathcal{L}}{partial W} = textbf{x}otimes(W'textbf{e}) } end{equation} >(11)$](https://habrastorage.org/getpro/habr/formulas/77a/9d5/c28/77a9d5c284dd0e9a88312931291952a2.svg)
3.3 Градиентный спуск на основе полученных выше результатов
Теперь, когда у нас есть уравнения (7) и (9), у нас есть все необходимое для реализации одной итерации обучения нейросети на базе алгоритма обратного распространения ошибки, применяя градиентный спуск. Каждая итерация должна немного приближать к минимуму функцию потерь. После задания скорости обучения  , мы можем обновить наши веса следующим образом:
, мы можем обновить наши веса следующим образом:

3.4 Итерация алгоритма
Все описанное выше является всего лишь одним маленьким шагов всего процесса оптимизации. В частности, до этого момента мы обучали нашу нейросеть всего на одном тренировочном примере. Чтобы завершить первый проход, мы должны применить все обучающие примеры. Сделав это, мы пройдем одну эпоху обучения. После чего нам нужно будет повторять цикл обучения, пройдя достаточное количество эпох, пока изменения функции потерь не станут незначительными, после чего можно будет остановиться и считать нейросеть обученной.
4. Алгоритм обратного распространения для контекста из нескольких слов в модели CBOW
Мы уже знаем как работает алгоритм обратного распространения для модели CBOW с одним словом на входе. Теперь увеличим сложность и добавим в контекст несколько слов. Рисунок (4) показывает как выглядит нейросеть теперь. Вход теперь представляет собой серию OneHot Encoded векторов слов входящих в контекст. Количество слов в контексте является параметром который мы можем задавать при инициализации word2vec. Скрытый слой получает усреднение из всех контекстных слов.

Рисунок 4. Топология модели CBOW с контекстом из нескольких слов
Уравнения модели CBOW с несколькими контекстными словами являются обобщением уравнений модели CBOW с одним контекстным словом.

Обратите внимание, что для удобства мы ввели определение ‘усредненный’ входной вектор 
Как и прежде, чтобы применить алгоритм обратного распространения нам нужно выписать функцию потерь и выписать ее зависимости. Функция потерь выглядит также как и раньше:

Снова выпишем уравнения по правилу цепочки, аналогично предыдущим:

и

Производные функции потерь по весам такие же как для модели CBOW с одним словом на входе, с единственным отличием, что мы заменим входной вектор из одного слова на усредненный вектор из слов контекста. Выведем эти уравнения начиная с производной по

Теперь запишем производную по  :
:

Подведя итог имеем следующее:
![$begin{equation} bbox[white,5px,border:2px dotted red]{ frac{partialmathcal{L}}{partial W'_{ij}} = (-delta_{jj^*} + y_j) left(sum_{k=1}^V W_{ki}overline{x}_kright) } label{eq:backprop1_multi} end{equation} >(17)$](https://habrastorage.org/getpro/habr/formulas/bbf/a4f/3a7/bbfa4f3a70b9847b95bbece21679c082.svg)
и
![$begin{equation} bbox[white,5px,border:2px dotted red]{ frac{partialmathcal{L}}{partial W_{ij}} = sum_{k=1}^V(-delta_{kk^*} + y_k)W'_{jk}overline{x}_i . } label{eq:backprop2_multi} end{equation} > (18)$](https://habrastorage.org/getpro/habr/formulas/771/fc5/b58/771fc5b58d851d8b22dae41a2f021bb0.svg)
Векторизация
Перепишем уравнения (17) и (18) в записи для векторов.
Уравнение (17) примет вид:
![$begin{equation} bbox[white,5px,border:2px dotted red]{ frac{partialmathcal{L}}{partial W'} = (W^Toverline{textbf{x}}) otimes textbf{e} } end{equation} >(19)$](https://habrastorage.org/getpro/habr/formulas/303/5a8/2d7/3035a82d71fdedea0877f0b49714a411.svg)
Для уравнения (18):
![$begin{equation} bbox[white,5px,border:2px dotted red]{ frac{partial mathcal{L}}{partial W} =overline{textbf{x}}otimes(W'textbf{e}) } end{equation} >(20)$](https://habrastorage.org/getpro/habr/formulas/8df/37e/997/8df37e9970aa67a7a4616d8e32a4c662.svg)
Еще раз, обратите внимание что уравнения идентичны уравнениям в модели CBOW для контекста из одного слова.
Оператор ⊗ обозначает векторное произведение.
5. Алгоритм обратного распространения для модели Skip-gram
Данная модель по сути обратна модели CBOW, на вход подается центральное слово, на выходе предсказывается его контекст. Полученная нейросеть выглядит следующим образом:

Рисунок 5.Топология Skip-gram модели.
Уравнения skip-gram модели следующие:

Обратите внимание что выходные вектора (как и вектор  ) идентичны,
) идентичны,  . Функция потерь выглядит следующим образом:
. Функция потерь выглядит следующим образом:

Для модели skip-gram функция потерь зависит от  переменных
переменных
через:

Соответственно правило цепочки выглядит так:

и

Посчитаем  , получим:
, получим:

Аналогично модели CBOW получаем:

Производная по самая сложная, но выполнимая:

Подведя итог, для модели skip-gram мы имеем:
![$begin{equation} bbox[white,5px,border:2px dotted red]{ frac{partialmathcal{L}}{partial W'_{ij}} = sum_{c=1}^C(-delta_{jj_c^*} + y_{c,j}) left(sum_{k=1}^V W_{ki}x_kright) } label{eq:backprop1_skip} end{equation} >(21)$](https://habrastorage.org/getpro/habr/formulas/225/01c/d97/22501cd97ab26ba6d82d5bfb88fe05cd.svg)
и
![$begin{equation} bbox[white,5px,border:2px dotted red]{ frac{partialmathcal{L}}{partial W_{ij}} = sum_{k=1}^Vsum_{c=1}^C (-delta_{kk_c^*} + y_{c,k})W'_{jk}x_i . } label{eq:backprop2_skip} end{equation} >(22)$](https://habrastorage.org/getpro/habr/formulas/612/851/c5f/612851c5f223cb8f5959d0a625376aa9.svg)
Векторизация
Векторизованная версия уравнения (21):
![$begin{equation} bbox[white,5px,border:2px dotted red]{ frac{partialmathcal{L}}{partial W'} = (W^Ttextbf{x}) otimes sum_{c=1}^Ctextbf{e}_c } end{equation} >(23)$](https://habrastorage.org/getpro/habr/formulas/076/88a/74f/07688a74f6d47e8fd9a7366d5f95140b.svg)
Уравнение (22):
![$begin{equation} bbox[white,5px,border:2px dotted red]{ frac{partial mathcal{L}}{partial W} = textbf{x}otimesleft(W'sum_{c=1}^Ctextbf{e}_cright) } end{equation} >(24)$](https://habrastorage.org/getpro/habr/formulas/51d/fc9/21a/51dfc921acc63be1b7c819020fea7acf.svg)
6. Что дальше
Мы подробно рассмотрели как работает алгоритм обратного распространения в случае word2vec. Однако рассмотренная реализация неэффективна для больших текстовых корпусов. В оригинальной статье [2] применяются некоторые трюки для преодоления этих проблем (иерархический softmax, negative sampling), однако я не буду на них останавливаться подробно. Вы можете найти подробное описание по ссылке [1].
Несмотря на вычислительную неэффективность реализации описанной здесь, она содержит всё необходимое для обучения нейронных сетей word2vec.
Следующим шагом будет реализация этих уравнений на вашем любимом языке программирования. Если вам нравится Python, я уже реализовал эти уравнения в моем следующем посте.
Надеюсь увидеть вас там!
Дополнительные ссылки
[1] X. Rong, word2vec Parameter Learning Explained, arXiv:1411.2738 (2014).
[2] T. Mikolov, K. Chen, G. Corrado, J. Dean, Efficient Estimation of Word Representations in Vector Space, arXiv:1301.3781 (2013).
Нейронные сети обучаются с помощью тех или иных модификаций градиентного спуска, а чтобы применять его, нужно уметь эффективно вычислять градиенты функции потерь по всем обучающим параметрам. Казалось бы, для какого-нибудь запутанного вычислительного графа это может быть очень сложной задачей, но на помощь спешит метод обратного распространения ошибки.
Открытие метода обратного распространения ошибки стало одним из наиболее значимых событий в области искусственного интеллекта. В актуальном виде он был предложен в 1986 году Дэвидом Э. Румельхартом, Джеффри Э. Хинтоном и Рональдом Дж. Вильямсом и независимо и одновременно красноярскими математиками С. И. Барцевым и В. А. Охониным. С тех пор для нахождения градиентов параметров нейронной сети используется метод вычисления производной сложной функции, и оценка градиентов параметров сети стала хоть сложной инженерной задачей, но уже не искусством. Несмотря на простоту используемого математического аппарата, появление этого метода привело к значительному скачку в развитии искусственных нейронных сетей.
Суть метода можно записать одной формулой, тривиально следующей из формулы производной сложной функции: если $f(x) = g_m(g_{m-1}(ldots (g_1(x)) ldots))$, то $frac{partial f}{partial x} = frac{partial g_m}{partial g_{m-1}}frac{partial g_{m-1}}{partial g_{m-2}}ldots frac{partial g_2}{partial g_1}frac{partial g_1}{partial x}$. Уже сейчас мы видим, что градиенты можно вычислять последовательно, в ходе одного обратного прохода, начиная с $frac{partial g_m}{partial g_{m-1}}$ и умножая каждый раз на частные производные предыдущего слоя.
Backpropagation в одномерном случае
В одномерном случае всё выглядит особенно просто. Пусть $w_0$ — переменная, по которой мы хотим продифференцировать, причём сложная функция имеет вид
$$f(w_0) = g_m(g_{m-1}(ldots g_1(w_0)ldots)),$$
где все $g_i$ скалярные. Тогда
$$f'(w_0) = g_m'(g_{m-1}(ldots g_1(w_0)ldots))cdot g’_{m-1}(g_{m-2}(ldots g_1(w_0)ldots))cdotldots cdot g’_1(w_0)$$
Суть этой формулы такова. Если мы уже совершили forward pass, то есть уже знаем
$$g_1(w_0), g_2(g_1(w_0)),ldots,g_{m-1}(ldots g_1(w_0)ldots),$$
то мы действуем следующим образом:
-
берём производную $g_m$ в точке $g_{m-1}(ldots g_1(w_0)ldots)$;
-
умножаем на производную $g_{m-1}$ в точке $g_{m-2}(ldots g_1(w_0)ldots)$;
-
и так далее, пока не дойдём до производной $g_1$ в точке $w_0$.
Проиллюстрируем это на картинке, расписав по шагам дифференцирование по весам $w_i$ функции потерь логистической регрессии на одном объекте (то есть для батча размера 1):

Собирая все множители вместе, получаем:
$$frac{partial f}{partial w_0} = (-y)cdot e^{-y(w_0 + w_1x_1 + w_2x_2)}cdotfrac{-1}{1 + e^{-y(w_0 + w_1x_1 + w_2x_2)}}$$
$$frac{partial f}{partial w_1} = x_1cdot(-y)cdot e^{-y(w_0 + w_1x_1 + w_2x_2)}cdotfrac{-1}{1 + e^{-y(w_0 + w_1x_1 + w_2x_2)}}$$
$$frac{partial f}{partial w_2} = x_2cdot(-y)cdot e^{-y(w_0 + w_1x_1 + w_2x_2)}cdotfrac{-1}{1 + e^{-y(w_0 + w_1x_1 + w_2x_2)}}$$
Таким образом, мы видим, что сперва совершается forward pass для вычисления всех промежуточных значений (и да, все промежуточные представления нужно будет хранить в памяти), а потом запускается backward pass, на котором в один проход вычисляются все градиенты.
Почему же нельзя просто пойти и начать везде вычислять производные?
В главе, посвящённой матричным дифференцированиям, мы поднимаем вопрос о том, что вычислять частные производные по отдельности — это зло, лучше пользоваться матричными вычислениями. Но есть и ещё одна причина: даже и с матричной производной в принципе не всегда хочется иметь дело. Рассмотрим простой пример. Допустим, что $X^r$ и $X^{r+1}$ — два последовательных промежуточных представления $Ntimes M$ и $Ntimes K$, связанных функцией $X^{r+1} = f^{r+1}(X^r)$. Предположим, что мы как-то посчитали производную $frac{partialmathcal{L}}{partial X^{r+1}_{ij}}$ функции потерь $mathcal{L}$, тогда
$$frac{partialmathcal{L}}{partial X^{r}_{st}} = sum_{i,j}frac{partial f^{r+1}_{ij}}{partial X^{r}_{st}}frac{partialmathcal{L}}{partial X^{r+1}_{ij}}$$
И мы видим, что, хотя оба градиента $frac{partialmathcal{L}}{partial X_{ij}^{r+1}}$ и $frac{partialmathcal{L}}{partial X_{st}^{r}}$ являются просто матрицами, в ходе вычислений возникает «четырёхмерный кубик» $frac{partial f_{ij}^{r+1}}{partial X_{st}^{r}}$, даже хранить который весьма болезненно: уж больно много памяти он требует ($N^2MK$ по сравнению с безобидными $NM + NK$, требуемыми для хранения градиентов). Поэтому хочется промежуточные производные $frac{partial f^{r+1}}{partial X^{r}}$ рассматривать не как вычисляемые объекты $frac{partial f_{ij}^{r+1}}{partial X_{st}^{r}}$, а как преобразования, которые превращают $frac{partialmathcal{L}}{partial X_{ij}^{r+1}}$ в $frac{partialmathcal{L}}{partial X_{st}^{r}}$. Целью следующих глав будет именно это: понять, как преобразуется градиент в ходе error backpropagation при переходе через тот или иной слой.
Вы спросите себя: надо ли мне сейчас пойти и прочитать главу учебника про матричное дифференцирование?
Встречный вопрос. Найдите производную функции по вектору $x$:
$$f(x) = x^TAx, Ain Mat_{n}{mathbb{R}}text{ — матрица размера }ntimes n$$
А как всё поменяется, если $A$ тоже зависит от $x$? Чему равен градиент функции, если $A$ является скаляром? Если вы готовы прямо сейчас взять ручку и бумагу и посчитать всё, то вам, вероятно, не надо читать про матричные дифференцирования. Но мы советуем всё-таки заглянуть в эту главу, если обозначения, которые мы будем дальше использовать, покажутся вам непонятными: единой нотации для матричных дифференцирований человечество пока, увы, не изобрело, и переводить с одной на другую не всегда легко.
Мы же сразу перейдём к интересующей нас вещи: к вычислению градиентов сложных функций.
Градиент сложной функции
Напомним, что формула производной сложной функции выглядит следующим образом:
$$left[D_{x_0} (color{#5002A7}{u} circ color{#4CB9C0}{v}) right](h) = color{#5002A7}{left[D_{v(x_0)} u right]} left( color{#4CB9C0}{left[D_{x_0} vright]} (h)right)$$
Теперь разберёмся с градиентами. Пусть $f(x) = g(h(x))$ – скалярная функция. Тогда
$$left[D_{x_0} f right] (x-x_0) = langlenabla_{x_0} f, x-x_0rangle.$$
С другой стороны,
$$left[D_{h(x_0)} g right] left(left[D_{x_0}h right] (x-x_0)right) = langlenabla_{h_{x_0}} g, left[D_{x_0} hright] (x-x_0)rangle = langleleft[D_{x_0} hright]^* nabla_{h(x_0)} g, x-x_0rangle.$$
То есть $color{#FFC100}{nabla_{x_0} f} = color{#348FEA}{left[D_{x_0} h right]}^* color{#FFC100}{nabla_{h(x_0)}}g$ — применение сопряжённого к $D_{x_0} h$ линейного отображения к вектору $nabla_{h(x_0)} g$.
Эта формула — сердце механизма обратного распространения ошибки. Она говорит следующее: если мы каким-то образом получили градиент функции потерь по переменным из некоторого промежуточного представления $X^k$ нейронной сети и при этом знаем, как преобразуется градиент при проходе через слой $f^k$ между $X^{k-1}$ и $X^k$ (то есть как выглядит сопряжённое к дифференциалу слоя между ними отображение), то мы сразу же находим градиент и по переменным из $X^{k-1}$:

Таким образом слой за слоем мы посчитаем градиенты по всем $X^i$ вплоть до самых первых слоёв.
Далее мы разберёмся, как именно преобразуются градиенты при переходе через некоторые распространённые слои.
Градиенты для типичных слоёв
Рассмотрим несколько важных примеров.
Примеры
-
$f(x) = u(v(x))$, где $x$ — вектор, а $v(x)$ – поэлементное применение $v$:
$$vbegin{pmatrix}
x_1
vdots
x_N
end{pmatrix}
= begin{pmatrix}
v(x_1)
vdots
v(x_N)
end{pmatrix}$$Тогда, как мы знаем,
$$left[D_{x_0} fright] (h) = langlenabla_{x_0} f, hrangle = left[nabla_{x_0} fright]^T h.$$
Следовательно,
$$begin{multline*}
left[D_{v(x_0)} uright] left( left[ D_{x_0} vright] (h)right) = left[nabla_{v(x_0)} uright]^T left(v'(x_0) odot hright) =\[0.1cm]
= sumlimits_i left[nabla_{v(x_0)} uright]_i v'(x_{0i})h_i
= langleleft[nabla_{v(x_0)} uright] odot v'(x_0), hrangle.
end{multline*},$$где $odot$ означает поэлементное перемножение. Окончательно получаем
$$color{#348FEA}{nabla_{x_0} f = left[nabla_{v(x_0)}uright] odot v'(x_0) = v'(x_0) odot left[nabla_{v(x_0)} uright]}$$
Отметим, что если $x$ и $h(x)$ — это просто векторы, то мы могли бы вычислять всё и по формуле $frac{partial f}{partial x_i} = sum_jbig(frac{partial z_j}{partial x_i}big)cdotbig(frac{partial h}{partial z_j}big)$. В этом случае матрица $big(frac{partial z_j}{partial x_i}big)$ была бы диагональной (так как $z_j$ зависит только от $x_j$: ведь $h$ берётся поэлементно), и матричное умножение приводило бы к тому же результату. Однако если $x$ и $h(x)$ — матрицы, то $big(frac{partial z_j}{partial x_i}big)$ представлялась бы уже «четырёхмерным кубиком», и работать с ним было бы ужасно неудобно.
-
$f(X) = g(XW)$, где $X$ и $W$ — матрицы. Как мы знаем,
$$left[D_{X_0} f right] (X-X_0) = text{tr}, left(left[nabla_{X_0} fright]^T (X-X_0)right).$$
Тогда
$$begin{multline*}
left[ D_{X_0W} g right] left(left[D_{X_0} left( ast Wright)right] (H)right) =
left[ D_{X_0W} g right] left(HWright)=\
= text{tr}, left( left[nabla_{X_0W} g right]^T cdot (H) W right) =\
=
text{tr} , left(W left[nabla_{X_0W} (g) right]^T cdot (H)right) = text{tr} , left( left[left[nabla_{X_0W} gright] W^Tright]^T (H)right)
end{multline*}$$Здесь через $ast W$ мы обозначили отображение $Y hookrightarrow YW$, а в предпоследнем переходе использовалось следующее свойство следа:
$$
text{tr} , (A B C) = text{tr} , (C A B),
$$где $A, B, C$ — произвольные матрицы подходящих размеров (то есть допускающие перемножение в обоих приведённых порядках). Следовательно, получаем
$$color{#348FEA}{nabla_{X_0} f = left[nabla_{X_0W} (g) right] cdot W^T}$$
-
$f(W) = g(XW)$, где $W$ и $X$ — матрицы. Для приращения $H = W — W_0$ имеем
$$
left[D_{W_0} f right] (H) = text{tr} , left( left[nabla_{W_0} f right]^T (H)right)
$$Тогда
$$ begin{multline*}
left[D_{XW_0} g right] left( left[D_{W_0} left(X astright) right] (H)right) = left[D_{XW_0} g right] left( XH right) =
= text{tr} , left( left[nabla_{XW_0} g right]^T cdot X (H)right) =
text{tr}, left(left[X^T left[nabla_{XW_0} g right] right]^T (H)right)
end{multline*} $$Здесь через $X ast$ обозначено отображение $Y hookrightarrow XY$. Значит,
$$color{#348FEA}{nabla_{X_0} f = X^T cdot left[nabla_{XW_0} (g)right]}$$
-
$f(X) = g(softmax(X))$, где $X$ — матрица $Ntimes K$, а $softmax$ — функция, которая вычисляется построчно, причём для каждой строки $x$
$$softmax(x) = left(frac{e^{x_1}}{sum_te^{x_t}},ldots,frac{e^{x_K}}{sum_te^{x_t}}right)$$
В этом примере нам будет удобно воспользоваться формализмом с частными производными. Сначала вычислим $frac{partial s_l}{partial x_j}$ для одной строки $x$, где через $s_l$ мы для краткости обозначим $softmax(x)_l = frac{e^{x_l}} {sum_te^{x_t}}$. Нетрудно проверить, что
$$frac{partial s_l}{partial x_j} = begin{cases}
s_j(1 — s_j), & j = l,
-s_ls_j, & jne l
end{cases}$$Так как softmax вычисляется независимо от каждой строчки, то
$$frac{partial s_{rl}}{partial x_{ij}} = begin{cases}
s_{ij}(1 — s_{ij}), & r=i, j = l,
-s_{il}s_{ij}, & r = i, jne l,
0, & rne i
end{cases},$$где через $s_{rl}$ мы обозначили для краткости $softmax(X)_{rl}$.
Теперь пусть $nabla_{rl} = nabla g = frac{partialmathcal{L}}{partial s_{rl}}$ (пришедший со следующего слоя, уже известный градиент). Тогда
$$frac{partialmathcal{L}}{partial x_{ij}} = sum_{r,l}frac{partial s_{rl}}{partial x_{ij}} nabla_{rl}$$
Так как $frac{partial s_{rl}}{partial x_{ij}} = 0$ при $rne i$, мы можем убрать суммирование по $r$:
$$ldots = sum_{l}frac{partial s_{il}}{partial x_{ij}} nabla_{il} = -s_{i1}s_{ij}nabla_{i1} — ldots + s_{ij}(1 — s_{ij})nabla_{ij}-ldots — s_{iK}s_{ij}nabla_{iK} =$$
$$= -s_{ij}sum_t s_{it}nabla_{it} + s_{ij}nabla_{ij}$$
Таким образом, если мы хотим продифференцировать $f$ в какой-то конкретной точке $X_0$, то, смешивая математические обозначения с нотацией Python, мы можем записать:
$$begin{multline*}
color{#348FEA}{nabla_{X_0}f =}\
color{#348FEA}{= -softmax(X_0) odot text{sum}left(
softmax(X_0)odotnabla_{softmax(X_0)}g, text{ axis = 1}
right) +}\
color{#348FEA}{softmax(X_0)odot nabla_{softmax(X_0)}g}
end{multline*}
$$
Backpropagation в общем виде
Подытожим предыдущее обсуждение, описав алгоритм error backpropagation (алгоритм обратного распространения ошибки). Допустим, у нас есть текущие значения весов $W^i_0$ и мы хотим совершить шаг SGD по мини-батчу $X$. Мы должны сделать следующее:
- Совершить forward pass, вычислив и запомнив все промежуточные представления $X = X^0, X^1, ldots, X^m = widehat{y}$.
- Вычислить все градиенты с помощью backward pass.
- С помощью полученных градиентов совершить шаг SGD.
Проиллюстрируем алгоритм на примере двуслойной нейронной сети со скалярным output’ом. Для простоты опустим свободные члены в линейных слоях.
 Обучаемые параметры – матрицы $U$ и $W$. Как найти градиенты по ним в точке $U_0, W_0$?
Обучаемые параметры – матрицы $U$ и $W$. Как найти градиенты по ним в точке $U_0, W_0$?
$$nabla_{W_0}mathcal{L} = nabla_{W_0}{left({vphantom{frac12}mathcal{L}circ hcircleft[Wmapsto g(XU_0)Wright]}right)}=$$
$$=g(XU_0)^Tnabla_{g(XU_0)W_0}(mathcal{L}circ h) = underbrace{g(XU_0)^T}_{ktimes N}cdot
left[vphantom{frac12}underbrace{h’left(vphantom{int_0^1}g(XU_0)W_0right)}_{Ntimes 1}odot
underbrace{nabla_{hleft(vphantom{int_0^1}g(XU_0)W_0right)}mathcal{L}}_{Ntimes 1}right]$$
Итого матрица $ktimes 1$, как и $W_0$
$$nabla_{U_0}mathcal{L} = nabla_{U_0}left(vphantom{frac12}
mathcal{L}circ hcircleft[Ymapsto YW_0right]circ gcircleft[ Umapsto XUright]
right)=$$
$$=X^Tcdotnabla_{XU^0}left(vphantom{frac12}mathcal{L}circ hcirc [Ymapsto YW_0]circ gright) =$$
$$=X^Tcdotleft(vphantom{frac12}g'(XU_0)odot
nabla_{g(XU_0)}left[vphantom{in_0^1}mathcal{L}circ hcirc[Ymapsto YW_0right]
right)$$
$$=ldots = underset{Dtimes N}{X^T}cdotleft(vphantom{frac12}
underbrace{g'(XU_0)}_{Ntimes K}odot
underbrace{left[vphantom{int_0^1}left(
underbrace{h’left(vphantom{int_0^1}g(XU_0)W_0right)}_{Ntimes1}odotunderbrace{nabla_{h(vphantom{int_0^1}gleft(XU_0right)W_0)}mathcal{L}}_{Ntimes 1}
right)cdot underbrace{W^T}_{1times K}right]}_{Ntimes K}
right)$$
Итого $Dtimes K$, как и $U_0$
Схематически это можно представить следующим образом:

Backpropagation для двуслойной нейронной сети
Если вы не уследили за вычислениями в предыдущем примере, давайте более подробно разберём его чуть более конкретную версию (для $g = h = sigma$)Рассмотрим двуслойную нейронную сеть для классификации. Мы уже встречали ее ранее при рассмотрении линейно неразделимой выборки. Предсказания получаются следующим образом:
$$
widehat{y} = sigma(X^1 W^2) = sigmaBig(big(sigma(X^0 W^1 )big) W^2 Big).
$$
Пусть $W^1_0$ и $W^2_0$ — текущее приближение матриц весов. Мы хотим совершить шаг по градиенту функции потерь, и для этого мы должны вычислить её градиенты по $W^1$ и $W^2$ в точке $(W^1_0, W^2_0)$.
Прежде всего мы совершаем forward pass, в ходе которого мы должны запомнить все промежуточные представления: $X^1 = X^0 W^1_0$, $X^2 = sigma(X^0 W^1_0)$, $X^3 = sigma(X^0 W^1_0) W^2_0$, $X^4 = sigma(sigma(X^0 W^1_0) W^2_0) = widehat{y}$. Они понадобятся нам дальше.
Для полученных предсказаний вычисляется значение функции потерь:
$$
l = mathcal{L}(y, widehat{y}) = y log(widehat{y}) + (1-y) log(1-widehat{y}).
$$
Дальше мы шаг за шагом будем находить производные по переменным из всё более глубоких слоёв.
-
Градиент $mathcal{L}$ по предсказаниям имеет вид
$$
nabla_{widehat{y}}l = frac{y}{widehat{y}} — frac{1 — y}{1 — widehat{y}} = frac{y — widehat{y}}{widehat{y} (1 — widehat{y})},
$$где, напомним, $ widehat{y} = sigma(X^3) = sigmaBig(big(sigma(X^0 W^1_0 )big) W^2_0 Big)$ (обратите внимание на то, что $W^1_0$ и $W^2_0$ тут именно те, из которых мы делаем градиентный шаг).
-
Следующий слой — поэлементное взятие $sigma$. Как мы помним, при переходе через него градиент поэлементно умножается на производную $sigma$, в которую подставлено предыдущее промежуточное представление:
$$
nabla_{X^3}l = sigma'(X^3)odotnabla_{widehat{y}}l = sigma(X^3)left( 1 — sigma(X^3) right) odot frac{y — widehat{y}}{widehat{y} (1 — widehat{y})} =
$$$$
= sigma(X^3)left( 1 — sigma(X^3) right) odot frac{y — sigma(X^3)}{sigma(X^3) (1 — sigma(X^3))} =
y — sigma(X^3)
$$ -
Следующий слой — умножение на $W^2_0$. В этот момент мы найдём градиент как по $W^2$, так и по $X^2$. При переходе через умножение на матрицу градиент, как мы помним, умножается с той же стороны на транспонированную матрицу, а значит:
$$
color{blue}{nabla_{W^2_0}l} = (X^2)^Tcdot nabla_{X^3}l = (X^2)^Tcdot(y — sigma(X^3)) =
$$$$
= color{blue}{left( sigma(X^0W^1_0) right)^T cdot (y — sigma(sigma(X^0W^1_0)W^2_0))}
$$Аналогичным образом
$$
nabla_{X^2}l = nabla_{X^3}lcdot (W^2_0)^T = (y — sigma(X^3))cdot (W^2_0)^T =
$$$$
= (y — sigma(X^2W_0^2))cdot (W^2_0)^T
$$ -
Следующий слой — снова взятие $sigma$.
$$
nabla_{X^1}l = sigma'(X^1)odotnabla_{X^2}l = sigma(X^1)left( 1 — sigma(X^1) right) odot left( (y — sigma(X^2W_0^2))cdot (W^2_0)^T right) =
$$$$
= sigma(X^1)left( 1 — sigma(X^1) right) odotleft( (y — sigma(sigma(X^1)W_0^2))cdot (W^2_0)^T right)
$$ -
Наконец, последний слой — это умножение $X^0$ на $W^1_0$. Тут мы дифференцируем только по $W^1$:
$$
color{blue}{nabla_{W^1_0}l} = (X^0)^Tcdot nabla_{X^1}l = (X^0)^Tcdot big( sigma(X^1) left( 1 — sigma(X^1) right) odot (y — sigma(sigma(X^1)W_0^2))cdot (W^2_0)^Tbig) =
$$$$
= color{blue}{(X^0)^Tcdotbig(sigma(X^0W^1_0)left( 1 — sigma(X^0W^1_0) right) odot (y — sigma(sigma(X^0W^1_0)W_0^2))cdot (W^2_0)^Tbig) }
$$
Итоговые формулы для градиентов получились страшноватыми, но они были получены друг из друга итеративно с помощью очень простых операций: матричного и поэлементного умножения, в которые порой подставлялись значения заранее вычисленных промежуточных представлений.
Автоматизация и autograd
Итак, чтобы нейросеть обучалась, достаточно для любого слоя $f^k: X^{k-1}mapsto X^k$ с параметрами $W^k$ уметь:
- превращать $nabla_{X^k_0}mathcal{L}$ в $nabla_{X^{k-1}_0}mathcal{L}$ (градиент по выходу в градиент по входу);
- считать градиент по его параметрам $nabla_{W^k_0}mathcal{L}$.
При этом слою совершенно не надо знать, что происходит вокруг. То есть слой действительно может быть запрограммирован как отдельная сущность, умеющая внутри себя делать forward pass и backward pass, после чего слои механически, как кубики в конструкторе, собираются в большую сеть, которая сможет работать как одно целое.
Более того, во многих случаях авторы библиотек для глубинного обучения уже о вас позаботились и создали средства для автоматического дифференцирования выражений (autograd). Поэтому, программируя нейросеть, вы почти всегда можете думать только о forward-проходе, прямом преобразовании данных, предоставив библиотеке дифференцировать всё самостоятельно. Это делает код нейросетей весьма понятным и выразительным (да, в реальности он тоже бывает большим и страшным, но сравните на досуге код какой-нибудь разухабистой нейросети и код градиентного бустинга на решающих деревьях и почувствуйте разницу).
Но это лишь начало
Метод обратного распространения ошибки позволяет удобно посчитать градиенты, но дальше с ними что-то надо делать, и старый добрый SGD едва ли справится с обучением современной сетки. Так что же делать? О некоторых приёмах мы расскажем в следующей главе.
Машинное обучение, Искусственный интеллект, Natural Language Processing
Рекомендация: подборка платных и бесплатных курсов PR-менеджеров — https://katalog-kursov.ru/
Поскольку я столкнулся с существенными затруднениями в поисках объяснения механизма обратного распространения ошибки, которое мне понравилось бы, я решил написать собственный пост об обратном распространении ошибки реализовав алгоритм Word2Vec. Моя цель, — объяснить сущность алгоритма, используя простую, но нетривиальную нейросеть. Кроме того, word2vec стал настолько популярным в NLP сообществе, что будет полезно сосредоточиться на нем.
Данный пост связан с другим, более практическим постом который рекомендую прочитать, в нем рассматривается непосредственная реализация word2vec на языке python. В данном же посте мы сосредоточимся в основном на теоретической части.
Начнем с вещей которые необходимы для настоящего понимания обратного распространения. Помимо понятий из машинного обучения, таких как, функция потерь и градиентный спуск, пригодятся еще два компонента из математики:
- линейная алгебра (в частности матричное умножение)
- правило цепочки дифференцирования функций от многих переменных
Если вам знакомы эти понятия, то дальнейшие рассуждения окажутся простыми. Если же вы еще не освоили их, то все равно сможете понять основы обратного распространения.
Сперва я хочу дать определение понятию обратного распространения, если смысл будет недостаточно понятен, он будет раскрыт подробнее в следующих пунктах.
1. Что такое алгоритм обратного распространения
В рамках нейронной сети, единственными параметрами участвующими в обучении сети, то есть минимизации функции потерь, являются веса (здесь имею в виду веса в широком смысле, относя к ним и смещения). Веса изменяются на каждой итерации, пока мы не приблизимся к минимуму функции потерь.
В таком контексте, обратное распространение — это эффективный алгоритм нахождения оптимальных весов нейронной сети, то есть тех, которые оптимизируют функцию потерь.
Стандартный способ нахождения этих весов, применение алгоритма градиентного спуска, который подразумевает нахождение частных производных функции потерь по всем весам.
Для тривиальных задач в которых всего две переменных, легко представить как работает градиентный спуск, если вы посмотрите на рисунок, то увидите трехмерный график функции потерь, как функции весов w1 и w2.

Рисунок 1. Визуальное объяснение алгоритма градиентного спуска.
Вначале мы не знаем оптимальные значения, то есть не знаем какие значения w1 и w2 минимизируют функцию потерь.
Допустим, мы начинаем с красной точки. Если мы знаем как изменяется функция потерь при изменении весов, то есть если мы знаем производные и , то мы можем сдвинуть красную точку ближе к минимуму функции потерь, которая представлена на графике синей точкой. Шаг сдвига определяется параметром , который обычно называется параметром обучения.
2. Word2Vec
Задача алгоритма word2vec, найти эмбеддинги слов в заданном текстовом корпусе, другими словами, это методика поиска представлений слов в низкой размерности. Как следствие, когда мы говорим о word2vec, мы обычно говорим о приложениях NLP.
Например, модель word2vec обученная со скрытым слоем размерности [N, 3], где N -количество слов в словаре, даст трехмерные эмбеддинги слов. Это значит что, например, слово ‘квартира’, будет представлено трехмерным вектором действительных чисел, который будет близок (воспринимайте это как Евклидову метрику), к представлению аналогичного слова, такого как ‘дом’. Другими словами, word2vec это техника отображения слов в числа.
В контексте word2vec используются две основные модели: мешок слов (CBOW) и скипграммы (skip-gram). Сначала мы рассмотрим простейшую модель, CBOW, с окном из одного слова, затем перейдем к окну из нескольких слов и наконец рассмотрим модель skip-gram.
По мере продвижения я покажу несколько небольших примеров с текстом состоящим всего из нескольких слов. Однако имейте в виду, что обычно woed2vec тренируется с миллиардами слов.
3. Простая модель CBOW
В CBOW модели задача состоит в поиске слова по его контексту. В простейшем случае когда контекст слова представлен одним словом, нейронная сеть будет выглядеть так:
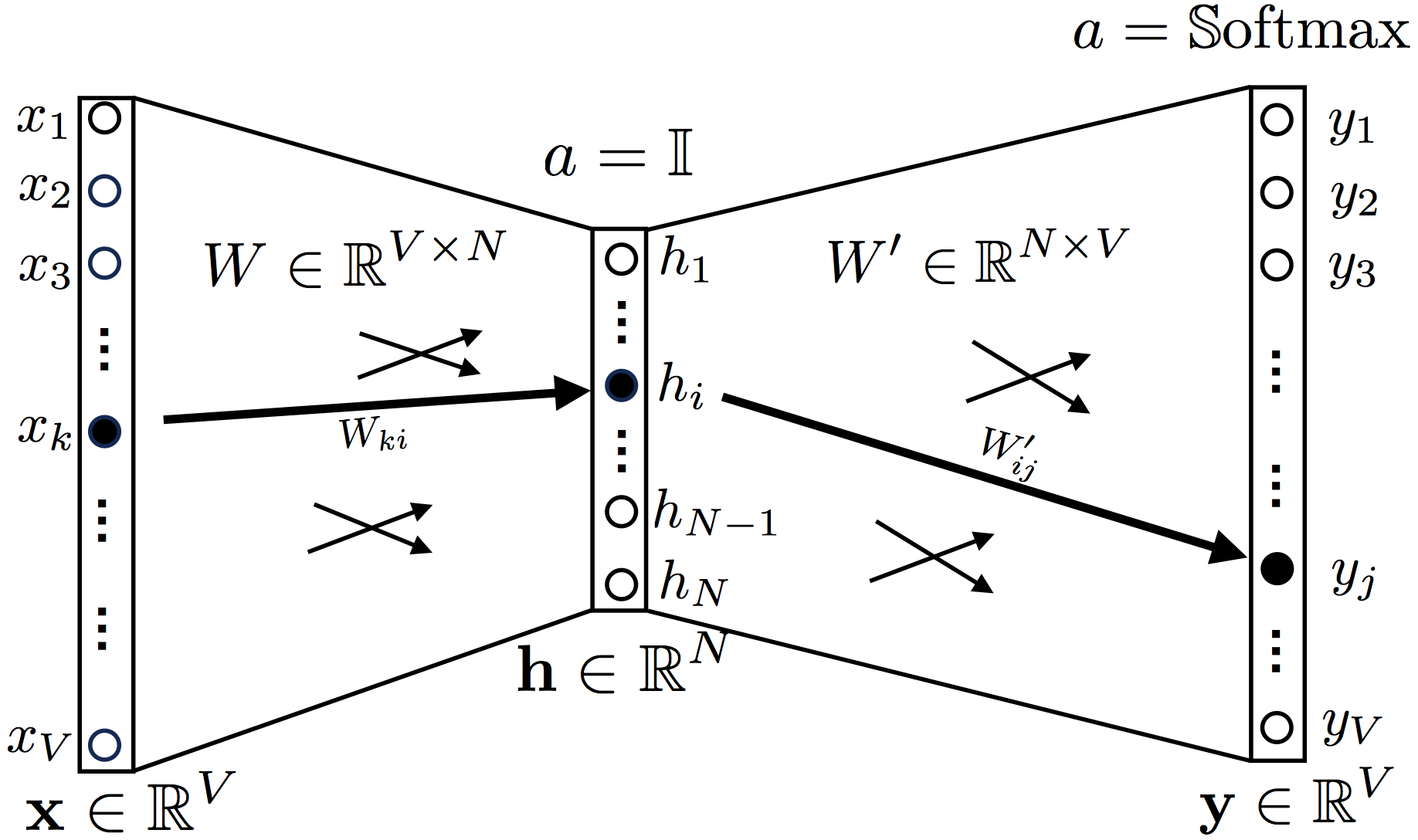
Рисунок 2. Топология модели Continuous Bag-of-Words модели с контекстом из одного слова
Один входной слой, один скрытый слой и выходной слой, функция активации скрытого слоя
a = 1 (identity function, или функция линейной активации, хотя последнее неправильно).
В качестве функции активации выходного слоя используется Softmax.
Входной слой представлен one hot encoding вектором, длина которого совпадает с размером массива слов, все элементы данного вектора равны нулю, кроме элементов, индексы которых совпадают с индексами слов из контекста, по данным индексам значения вектора равны 1.
Пример: словарь [‘мама’, ‘мыла’, ‘раму’, ‘маша’, ‘ела’, ‘кашу’]
OneHot(‘маша’) = [0, 0, 0, 1, 0, 0]
OneHot([‘мама’, ‘маша’]) = [1, 0, 0, 1, 0, 0]
OneHot([‘мама’, ‘ела’, ‘кашу’]) = [1, 0, 0, 0, 1, 1]
Перейдем к весам, весовые коэффициенты между входным и скрытым слоем представлены матрицей W размера , матрица между скрытым и выходным слоем размером , где V — размер словаря, N — размер эмбеддинг вектора (то есть, те вектора которые и пытается найти word2vec)
Выходной вектор y сравниваем с ожидаемым вектором t, чем они ближе, тем выше эффективность нейронной сети, и, соответственно, меньше функция потерь.
Если на текущем этапе что то звучит непонятно, то пример ниже должен прояснить ситуацию.
Пример
Предположим, мы хотим обучить word2vec следующим текстом:
«I like playing football»
Мы решаем обучить модель CBOW с одним контекстным словом как на рисунке (2) выше.
Учитывая текст который у нас есть, наш словарь будет состоять из 4 слов, соответственно V=4, также установим что скрытый слой будет иметь два нейрона, то есть N=2, наша нейросеть будет выглядеть так:
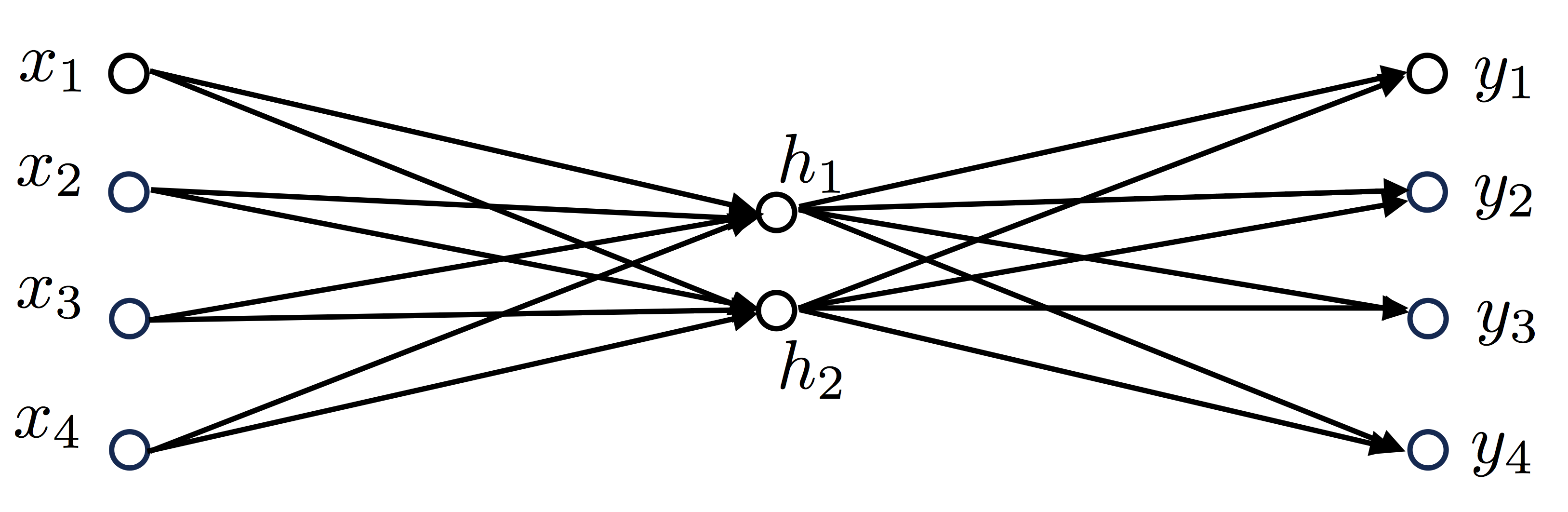
Со словарём:
Далее мы определяем как выбирать ‘целевое’ и ‘контекстное’ слово, и мы можем построить наши обучающие примеры двигаясь окном по тексту. Например:
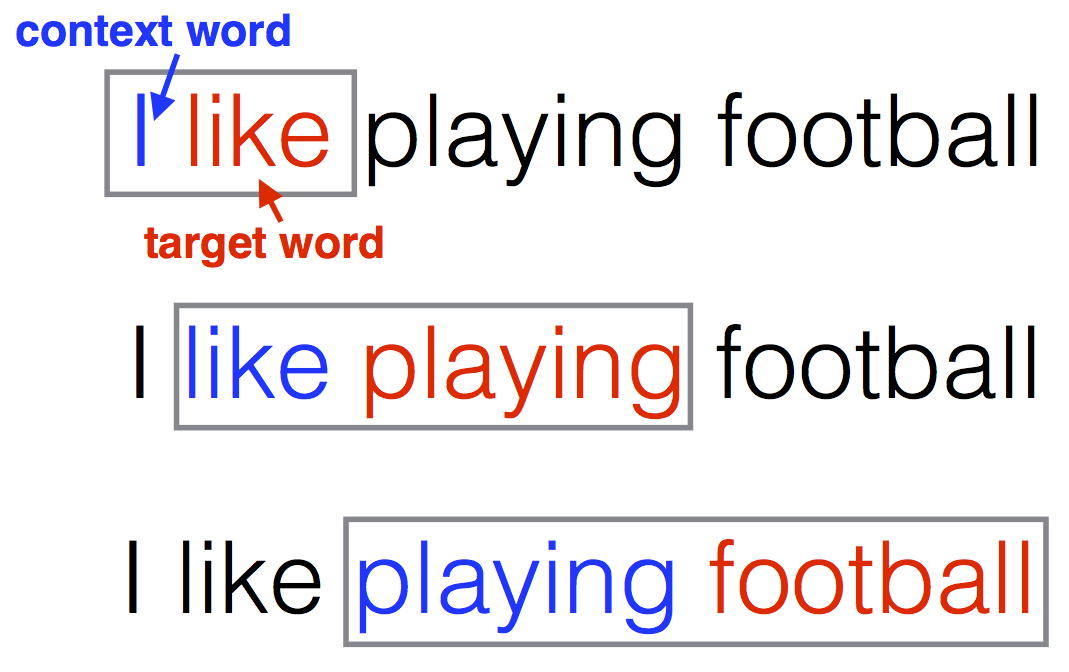
Тогда обучающие примеры будут выглядеть так:
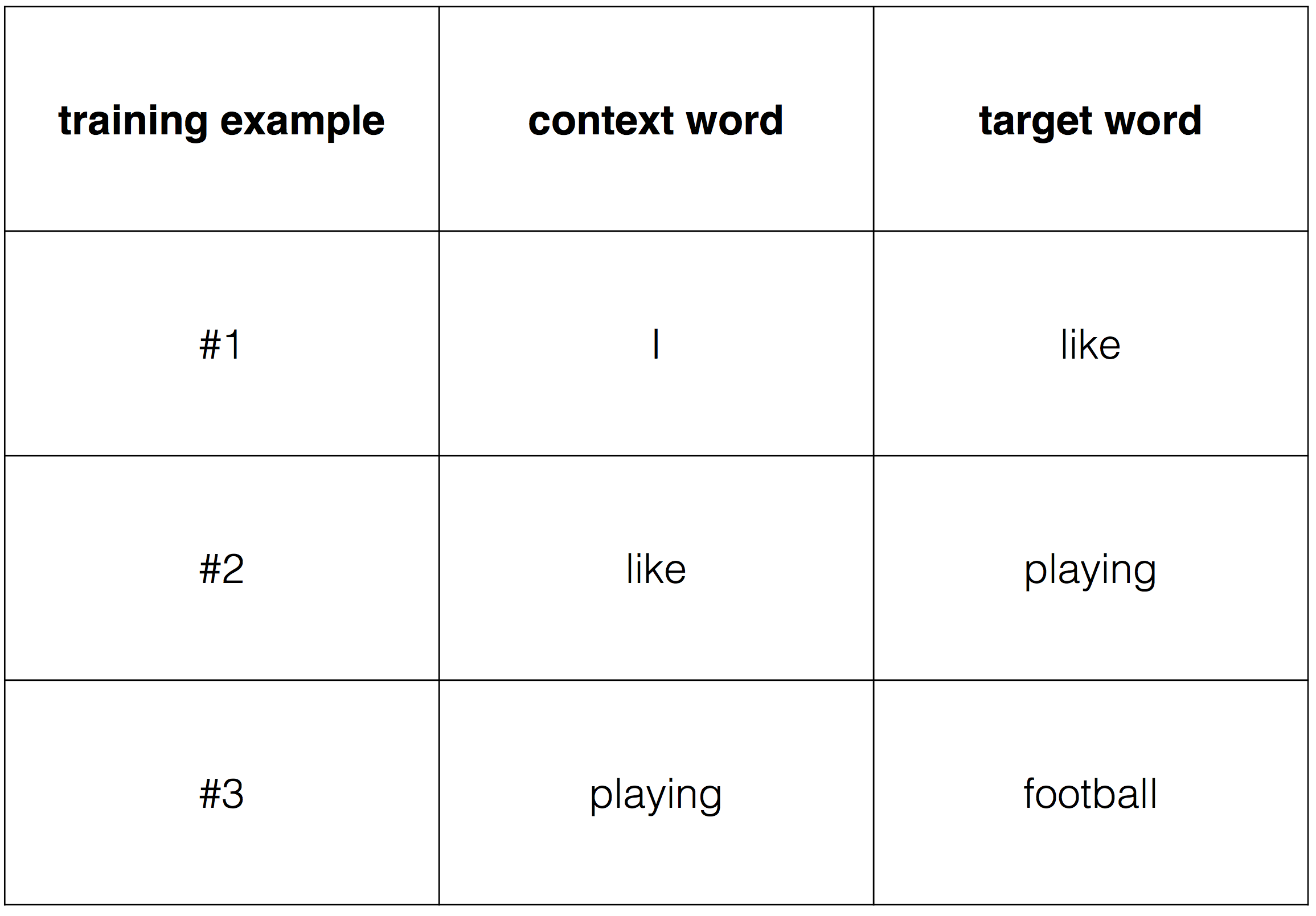
Чтобы передать эти данные в алгоритм понадобится преобразовать их в числа, для чего используем one-hot encoding.

На данный момент, мы хотим обучить нашу модель, находя веса, которые минимизируют функцию потерь. Это соответствует нахождению весов, которые с учетом вектора контекста могут с высокой точностью предсказать, что является соответствующим целевым словом.
3.1 Функция потерь (Loss function)
Исходя из топологии на рисунке 1, давайте запишем как посчитать значения скрытого и выходного слоев, при входе x:
где, h — сумма на скрытом слое, u — сумма на выходном слое, y — выход сети.
Теперь, предположим, мы обучаем модель по паре целевое слово, контекстное слово (wt, wc). Целевое слово представляет собой идеальное предсказание нейронной сети, в виде onehot encoding вектора.
Функция потерь должна будет оценить выходной слой, относительно onehot вектора wt (целевого слова).
Поскольку значения softmax можно интерпретировать как условные вероятности целевого слова, то учитывая контекстное слово функцию потерь можно записать в следующем виде:
$$display$$begin{equation*} mathcal{L} = -log mathbb{P}(w_t|w_c)=-log y_{j^*} =-log[mathbb{S}textrm{oftmax}(u_{j^*})]=-logleft(frac{exp{u_{j^*}}}{sum_i exp{u_i}}right), end{equation*}$$display$$
, где j* — ожидаемая позиция правильно предсказанного слова.
Добавление функции логарифма является стандартным подходом. Из данного выражения мы получаем уравнение (1):
$$display$$begin{equation} bbox[lightblue,5px,border:2px solid red]{ mathcal{L} = -u_{j^*} + log sum_i exp{(u_i)}. } label{eq:loss} end{equation} >(1)$$display$$
Функция потерь максимизирует вероятность предсказания правильного слова исходя из заданного контекста.
Пример
Вернемся к предыдущему примеру предложения «I like play football», предположим мы обучаем модель по первой записи обучающих данных, с контекстным словом «I» и целевым словом «like», в идеале веса сети должны быть такими, чтобы при вводе — что соответствует слову «I», результат работы был близок к , что соответствует слову «like».
Стандартный подход к инициализации весов word2vec, использование нормального распределения. Примем начальное состояние весов матрицы W размером
И начальное состояние весов матрицы размером
Для обучающих данных «I like» мы получаем:
Затем
И наконец
На этом этапе функция потерь будет отрицательным логарифмом второго элемента , или
Также, мы могли бы рассчитать ее при помощи уравнения (1):
Теперь, прежде чем перейти к следующему обучающему примеру «like play», мы должны изменить веса нейросети, как это сделать расскажет следующий пункт про обратное распространение.
3.2 Алгоритм обратного распространения для модели CBOW
Теперь, имея в наличии функцию потерь, мы хотим найти веса W и W` которые ее минимизируют. В терминах машинного обучения, мы хотим чтобы модель обучилась.
В первом разделе мы уже обсудили что в мире нейронный сетей эта проблема решается использованием градиентного спуска. На рисунке (1) показано как применить этот метод и обновить матрицы весов W и W`. Нам нужно найти производные и
Я считаю что самый простой способ понять как это сделать, это записать соотношения между функцией потерь и матрицами весов. Глядя на уравнение (1) ясно что функция потерь зависит от весов W и W`, через переменную u=[u1, …., uV], или
$$display$$begin{equation*} mathcal{L} = mathcal{L}(mathbf{u}(W,W’))=mathcal{L}(u_1(W,W’), u_2(W,W’),dots, u_V(W,W’)) . end{equation*}$$display$$
Получить производные можно из правила цепочки для функций многих переменных:
$$display$$begin{equation} frac{partialmathcal{L}}{partial W’_{ij}} = sum_{k=1}^Vfrac{partialmathcal{L}}{partial u_k}frac{partial u_k}{partial W’_{ij}} label{eq:dLdWp} end{equation} >(2)$$display$$
и
$$display$$begin{equation} frac{partialmathcal{L}}{partial W_{ij}} = sum_{k=1}^Vfrac{partialmathcal{L}}{partial u_k}frac{partial u_k}{partial W_{ij}} . label{eq:dLdW} end{equation} >(3)$$display$$
И это большая часть алгоритма обратного распространения, на данный момент нам просто нужно определить уравнения (2) и (3) для нашего случая.
Начнем с уравнения (2), обратите внимание что вес Wij, относится к матрице W, и соединяет нейрон i в скрытом слое с нейроном j в выходном слое, и соответственно оказывает влияние только на выход uj (соответственно и на yj).
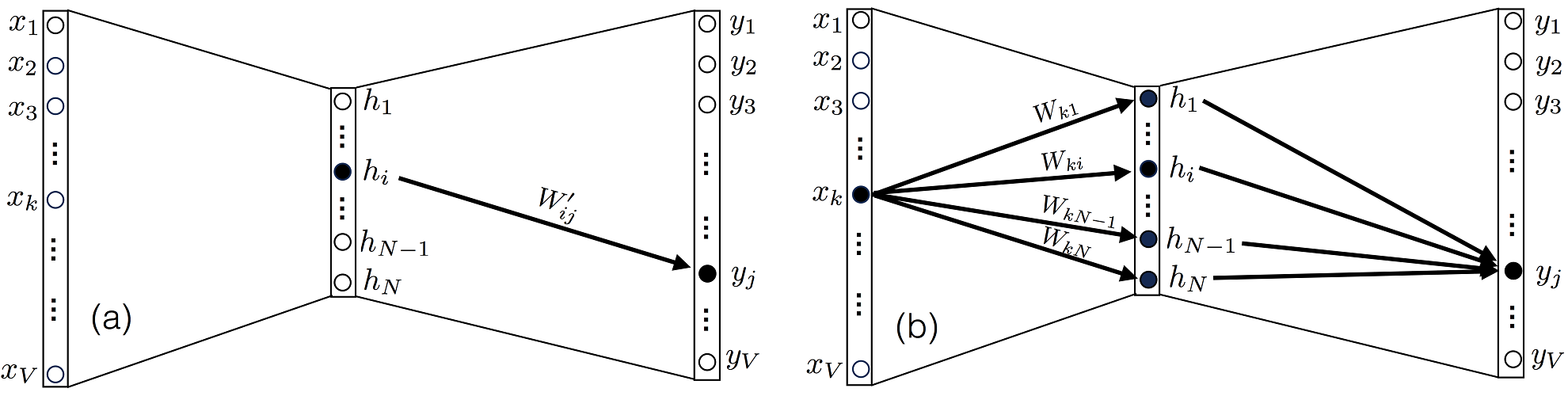
Рисунок 3. (a) Выходной узел зависит от общего узла скрытого слоя только через элемент матрицы . (b) Но кроме того, этот же выходной узел зависит от общего входного узла через N элементов матрицы W.
Следовательно, среди всех производных , только одна, где k=j, будет отличаться от 0.
Уравнение (4):
$$display$$begin{equation} frac{partialmathcal{L}}{partial W’_{ij}} = frac{partialmathcal{L}}{partial u_j}frac{partial u_j} {partial W’_{ij}} label{eq:derivative#1} end{equation} >(4)$$display$$
Давайте посчитаем , уравнение (5):
$$display$$begin{equation} frac{partialmathcal{L}}{partial u_j} = -delta_{jj^*} + y_j := e_j label{eq:term#1} end{equation} >(5)$$display$$
, где — дельта Кронекера, функция двух целых переменных, которая равна 1, если они равны, и 0 в противном случае.
В уравнении (5) мы ввели вектор e размерности N (размер словаря), который мы используем чтобы снизить сложность обозначений, этот вектор представляет собой разницу между полученным и ожидаемым результатом, то есть это вектор ошибок предсказания.
Для второго члена правой части уравнения (4) мы получим уравнения (6):
$$display$$begin{equation} frac{partial u_j}{partial W’_{ij}} = sum_{k=1}^V W_{ik}x_k label{eq:term#2} end{equation} >(6)$$display$$
После подставновки уравнений (5) и (6) в уравнение (4) мы получим уравнение (7):
$$display$$begin{equation} bbox[white,5px,border:2px dotted red]{ frac{partialmathcal{L}}{partial W’_{ij}} = (-delta_{jj^*} + y_j) left(sum_{k=1}^V W_{ki}x_kright) } label{eq:backprop1} end{equation} >(7)$$display$$
Мы можем найти выполнить аналогичное упражнение для поиска производной , однако на этот раз отметим что после задания входа Xk, выход yj нейрона j зависит от всех элементов матрицы W соединенных со входом, как видно на рисунке 3(b). Поэтому мы должны оценивать все элементы в сумме. Прежде чем перейти к оценке , полезно перезаписать выражение для элемента uk из вектора u как:
$$display$$begin{equation*} u_k = sum_{m=1}^Nsum_{l=1}^VW’_{mk}W_{lm}x_l . end{equation*}$$display$$
Из этого уравнения легко вывести , поскольку единственный выживший член производной будет с индексами l=i и m=j, или же в виде уравнения (8):
$$display$$begin{equation} frac{partial u_k}{partial W_{ij}} = W’_{jk}x_i . label{eq:term#3} end{equation} >(8)$$display$$
Наконец применив уравнения (5) и (8) мы получим результат, уравнение (9):
$$display$$begin{equation} bbox[white,5px,border:2px dotted red]{ frac{partial mathcal{L}}{partial W_{ij}} = sum_{k=1}^V (-delta_{kk^*}+y_k)W’_{jk}x_i } label{eq:backprop2} end{equation} >(9)$$display$$
Векторизация
Мы можем упростить запись уравнений. (7) и (9) используя векторную нотацию. Сделав это мы получим для уравнения (7)
$$display$$begin{equation} bbox[white,5px,border:2px dotted red]{ frac{partialmathcal{L}}{partial W’} = (W^Ttextbf{x}) otimes textbf{e} } end{equation} >(10)$$display$$
Где символ ? обозначает векторное произведение.
Для уравнения (9) мы получим:
$$display$$begin{equation} bbox[white,5px,border:2px dotted red]{ frac{partial mathcal{L}}{partial W} = textbf{x}otimes(W’textbf{e}) } end{equation} >(11)$$display$$
3.3 Градиентный спуск на основе полученных выше результатов
Теперь, когда у нас есть уравнения (7) и (9), у нас есть все необходимое для реализации одной итерации обучения нейросети на базе алгоритма обратного распространения ошибки, применяя градиентный спуск. Каждая итерация должна немного приближать к минимуму функцию потерь. После задания скорости обучения , мы можем обновить наши веса следующим образом:
3.4 Итерация алгоритма
Все описанное выше является всего лишь одним маленьким шагов всего процесса оптимизации. В частности, до этого момента мы обучали нашу нейросеть всего на одном тренировочном примере. Чтобы завершить первый проход, мы должны применить все обучающие примеры. Сделав это, мы пройдем одну эпоху обучения. После чего нам нужно будет повторять цикл обучения, пройдя достаточное количество эпох, пока изменения функции потерь не станут незначительными, после чего можно будет остановиться и считать нейросеть обученной.
4. Алгоритм обратного распространения для контекста из нескольких слов в модели CBOW
Мы уже знаем как работает алгоритм обратного распространения для модели CBOW с одним словом на входе. Теперь увеличим сложность и добавим в контекст несколько слов. Рисунок (4) показывает как выглядит нейросеть теперь. Вход теперь представляет собой серию OneHot Encoded векторов слов входящих в контекст. Количество слов в контексте является параметром который мы можем задавать при инициализации word2vec. Скрытый слой получает усреднение из всех контекстных слов.

Рисунок 4. Топология модели CBOW с контекстом из нескольких слов
Уравнения модели CBOW с несколькими контекстными словами являются обобщением уравнений модели CBOW с одним контекстным словом.
Обратите внимание, что для удобства мы ввели определение ‘усредненный’ входной вектор
Как и прежде, чтобы применить алгоритм обратного распространения нам нужно выписать функцию потерь и выписать ее зависимости. Функция потерь выглядит также как и раньше:
$$display$$begin{equation} mathcal{L} = -logmathbb{P}(w_o|w_{c,1},w_{c,2},dots,w_{c,C})=-u_{j^*} + log sum_i exp{(u_i)}. end{equation} >(12)$$display$$
Снова выпишем уравнения по правилу цепочки, аналогично предыдущим:
$$display$$begin{equation} frac{partialmathcal{L}}{partial W’_{ij}} = sum_{k=1}^Vfrac{partialmathcal{L}}{partial u_k}frac{partial u_k}{partial W’_{ij}} end{equation} >(13)$$display$$
и
$$display$$begin{equation} frac{partialmathcal{L}}{partial W_{ij}} = sum_{k=1}^Vfrac{partialmathcal{L}}{partial u_k}frac{partial u_k}{partial W_{ij}} . end{equation} >(14)$$display$$
Производные функции потерь по весам такие же как для модели CBOW с одним словом на входе, с единственным отличием, что мы заменим входной вектор из одного слова на усредненный вектор из слов контекста. Выведем эти уравнения начиная с производной по
$inline$begin{equation} frac{partialmathcal{L}}{partial W’_{ij}} = sum_{k=1}^Vfrac{partialmathcal{L}}{partial u_k}frac{partial u_k}{partial W’_{ij}} = frac{partialmathcal{L}}{partial u_j}frac{partial u_j}{partial W’_{ij}} = (-delta_{jj^*} + y_j) left(sum_{k=1}^V W_{ki}overline{x}_kright) end{equation} > (15)$inline$
Теперь запишем производную по :
$$display$$begin{equation} frac{partialmathcal{L}}{partial W_{ij}} = sum_{k=1}^Vfrac{partialmathcal{L}}{partial u_k}frac{partial}{partial W_{ij}}left(frac{1}{C}sum_{m=1}^Nsum_{l=1}^V W’_{mk}sum_{c=1}^C W_{lm}x_l^{(c)}right)=frac{1}{C}sum_{k=1}^Vsum_{c=1}^C(-delta_{kk^*} + y_k)W’_{jk}x_i^{(c)} . end{equation} >(16)$$display$$
Подведя итог имеем следующее:
$$display$$begin{equation} bbox[white,5px,border:2px dotted red]{ frac{partialmathcal{L}}{partial W’_{ij}} = (-delta_{jj^*} + y_j) left(sum_{k=1}^V W_{ki}overline{x}_kright) } label{eq:backprop1_multi} end{equation} >(17)$$display$$
и
$$display$$begin{equation} bbox[white,5px,border:2px dotted red]{ frac{partialmathcal{L}}{partial W_{ij}} = sum_{k=1}^V(-delta_{kk^*} + y_k)W’_{jk}overline{x}_i . } label{eq:backprop2_multi} end{equation} > (18)$$display$$
Векторизация
Перепишем уравнения (17) и (18) в записи для векторов.
Уравнение (17) примет вид:
$$display$$begin{equation} bbox[white,5px,border:2px dotted red]{ frac{partialmathcal{L}}{partial W’} = (W^Toverline{textbf{x}}) otimes textbf{e} } end{equation} >(19)$$display$$
Для уравнения (18):
$$display$$begin{equation} bbox[white,5px,border:2px dotted red]{ frac{partial mathcal{L}}{partial W} =overline{textbf{x}}otimes(W’textbf{e}) } end{equation} >(20)$$display$$
Еще раз, обратите внимание что уравнения идентичны уравнениям в модели CBOW для контекста из одного слова.
Оператор ? обозначает векторное произведение.
5. Алгоритм обратного распространения для модели Skip-gram
Данная модель по сути обратна модели CBOW, на вход подается центральное слово, на выходе предсказывается его контекст. Полученная нейросеть выглядит следующим образом:
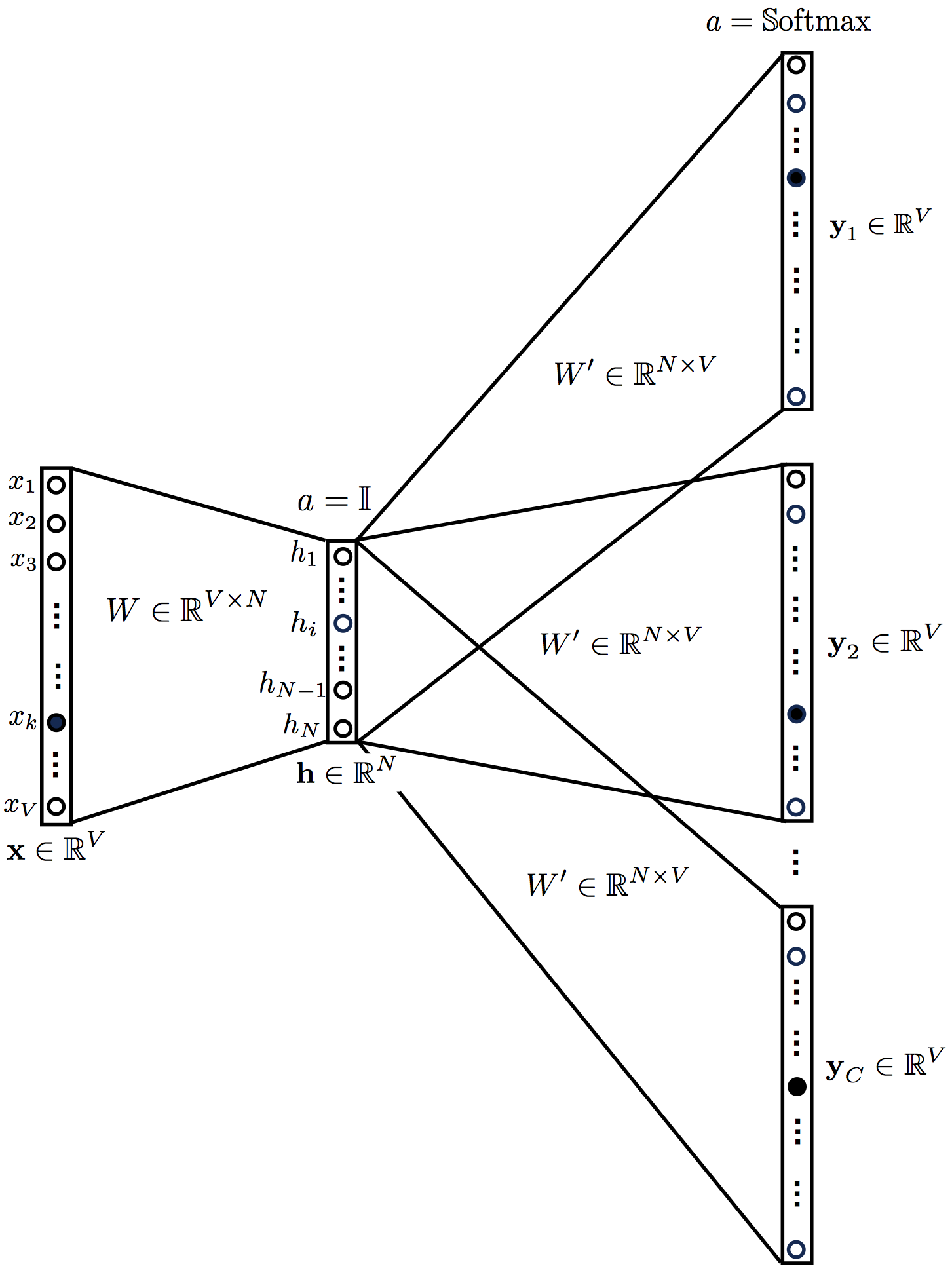
Рисунок 5.Топология Skip-gram модели.
Уравнения skip-gram модели следующие:
Обратите внимание что выходные вектора (как и вектор ) идентичны, . Функция потерь выглядит следующим образом:
Для модели skip-gram функция потерь зависит от переменных
через:
$$display$$begin{equation*} mathcal{L} = mathcal{L}(mathbf{u_1}(W,W’), mathbf{u_2}(W,W’), dots, mathbf{u_C}(W,W’))\=mathcal{L}(u_{1,1}(W,W’), u_{1,2}(W,W’), dots, u_{C,V}(W,W’)) end{equation*}$$display$$
Соответственно правило цепочки выглядит так:
$$display$$begin{equation*} frac{partialmathcal{L}}{partial W’_{ij}} = sum_{k=1}^Vsum_{c=1}^Cfrac{partialmathcal{L}}{partial u_{c,k}}frac{partial u_{c,k}}{partial W’_{ij}} end{equation*}$$display$$
и
$$display$$begin{equation*} frac{partialmathcal{L}}{partial W_{ij}} = sum_{k=1}^Vsum_{c=1}^Cfrac{partialmathcal{L}}{partial u_{c,k}}frac{partial u_{c,k}}{partial W_{ij}} . end{equation*}$$display$$
Посчитаем , получим:
$$display$$begin{equation*} frac{partialmathcal{L}}{partial u_{c,j}} = -delta_{jj_c^*} + y_{c,j} := e_{c,j} end{equation*}$$display$$
Аналогично модели CBOW получаем:
$$display$$begin{equation*} frac{partialmathcal{L}}{partial W’_{ij}} = sum_{k=1}^Vsum_{c=1}^Cfrac{partialmathcal{L}}{partial u_{c,k}}frac{partial u_{c,k}}{partial W’_{ij}} = sum_{c=1}^Cfrac{partialmathcal{L}}{partial u_{c,j}}frac{partial u_{c,j}}{partial W’_{ij}} = sum_{c=1}^C(-delta_{jj_c^*} + y_{c,j}) left(sum_{k=1}^V W_{ki}x_kright) end{equation*}$$display$$
Производная по самая сложная, но выполнимая:
$$display$$begin{equation*} frac{partialmathcal{L}}{partial W_{ij}} = sum_{k=1}^Vsum_{c=1}^Cfrac{partialmathcal{L}}{partial u_{c,k}}frac{partial}{partial W_{ij}}left(sum_{m=1}^Nsum_{l=1}^V W’_{mk} W_{lm}x_lright)=sum_{k=1}^Vsum_{c=1}^C (-delta_{kk_c^*} + y_{c,k})W’_{jk}x_i . end{equation*}$$display$$
Подведя итог, для модели skip-gram мы имеем:
$$display$$begin{equation} bbox[white,5px,border:2px dotted red]{ frac{partialmathcal{L}}{partial W’_{ij}} = sum_{c=1}^C(-delta_{jj_c^*} + y_{c,j}) left(sum_{k=1}^V W_{ki}x_kright) } label{eq:backprop1_skip} end{equation} >(21)$$display$$
и
$$display$$begin{equation} bbox[white,5px,border:2px dotted red]{ frac{partialmathcal{L}}{partial W_{ij}} = sum_{k=1}^Vsum_{c=1}^C (-delta_{kk_c^*} + y_{c,k})W’_{jk}x_i . } label{eq:backprop2_skip} end{equation} >(22)$$display$$
Векторизация
Векторизованная версия уравнения (21):
$$display$$begin{equation} bbox[white,5px,border:2px dotted red]{ frac{partialmathcal{L}}{partial W’} = (W^Ttextbf{x}) otimes sum_{c=1}^Ctextbf{e}_c } end{equation} >(23)$$display$$
Уравнение (22):
$$display$$begin{equation} bbox[white,5px,border:2px dotted red]{ frac{partial mathcal{L}}{partial W} = textbf{x}otimesleft(W’sum_{c=1}^Ctextbf{e}_cright) } end{equation} >(24)$$display$$
6. Что дальше
Мы подробно рассмотрели как работает алгоритм обратного распространения в случае word2vec. Однако рассмотренная реализация неэффективна для больших текстовых корпусов. В оригинальной статье [2] применяются некоторые трюки для преодоления этих проблем (иерархический softmax, negative sampling), однако я не буду на них останавливаться подробно. Вы можете найти подробное описание по ссылке [1].
Несмотря на вычислительную неэффективность реализации описанной здесь, она содержит всё необходимое для обучения нейронных сетей word2vec.
Следующим шагом будет реализация этих уравнений на вашем любимом языке программирования. Если вам нравится Python, я уже реализовал эти уравнения в моем следующем посте.
Надеюсь увидеть вас там!
Дополнительные ссылки
[1] X. Rong, word2vec Parameter Learning Explained, arXiv:1411.2738 (2014).
[2] T. Mikolov, K. Chen, G. Corrado, J. Dean, Efficient Estimation of Word Representations in Vector Space, arXiv:1301.3781 (2013).
Метод обратного распространения ошибок (англ. backpropagation) — метод вычисления градиента, который используется при обновлении весов в нейронной сети.
Содержание
- 1 Обучение как задача оптимизации
- 2 Дифференцирование для однослойной сети
- 2.1 Находим производную ошибки
- 3 Алгоритм
- 4 Недостатки алгоритма
- 4.1 Паралич сети
- 4.2 Локальные минимумы
- 5 Примечания
- 6 См. также
- 7 Источники информации
Обучение как задача оптимизации
Рассмотрим простую нейронную сеть без скрытых слоев, с двумя входными вершинами и одной выходной, в которых каждый нейрон использует линейную функцию активации, (обычно, многослойные нейронные сети используют нелинейные функции активации, линейные функции используются для упрощения понимания) которая является взвешенной суммой входных данных.
Простая нейронная сеть с двумя входными вершинами и одной выходной
Изначально веса задаются случайно. Затем, нейрон обучается с помощью тренировочного множества, которое в этом случае состоит из множества троек где и — это входные данные сети и — правильный ответ. Начальная сеть, приняв на вход и , вычислит ответ , который вероятно отличается от . Общепринятый метод вычисления несоответствия между ожидаемым и получившимся ответом — квадратичная функция потерь:
- где ошибка.
В качестве примера, обучим сеть на объекте , таким образом, значения и равны 1, а равно 0. Построим график зависимости ошибки от действительного ответа , его результатом будет парабола. Минимум параболы соответствует ответу , минимизирующему . Если тренировочный объект один, минимум касается горизонтальной оси, следовательно ошибка будет нулевая и сеть может выдать ответ равный ожидаемому ответу . Следовательно, задача преобразования входных значений в выходные может быть сведена к задаче оптимизации, заключающейся в поиске функции, которая даст минимальную ошибку.
График ошибки для нейрона с линейной функцией активации и одним тренировочным объектом
В таком случае, выходное значение нейрона — взвешенная сумма всех его входных значений:
где и — веса на ребрах, соединяющих входные вершины с выходной. Следовательно, ошибка зависит от весов ребер, входящих в нейрон. И именно это нужно менять в процессе обучения. Распространенный алгоритм для поиска набора весов, минимизирующего ошибку — градиентный спуск. Метод обратного распространения ошибки используется для вычисления самого «крутого» направления для спуска.
Дифференцирование для однослойной сети
Метод градиентного спуска включает в себя вычисление дифференциала квадратичной функции ошибки относительно весов сети. Обычно это делается с помощью метода обратного распространения ошибки. Предположим, что выходной нейрон один, (их может быть несколько, тогда ошибка — это квадратичная норма вектора разницы) тогда квадратичная функция ошибки:
- где — квадратичная ошибка, — требуемый ответ для обучающего образца, — действительный ответ сети.
Множитель добавлен чтобы предотвратить возникновение экспоненты во время дифференцирования. На результат это не повлияет, потому что позже выражение будет умножено на произвольную величину скорости обучения (англ. learning rate).
Для каждого нейрона , его выходное значение определено как
Входные значения нейрона — это взвешенная сумма выходных значений предыдущих нейронов. Если нейрон в первом слое после входного, то входного слоя — это просто входные значения сети. Количество входных значений нейрона . Переменная обозначает вес на ребре между нейроном предыдущего слоя и нейроном текущего слоя.
Функция активации нелинейна и дифференцируема. Одна из распространенных функций активации — сигмоида:
у нее удобная производная:
Находим производную ошибки
Вычисление частной производной ошибки по весам выполняется с помощью цепного правила:
Только одно слагаемое в зависит от , так что
Если нейрон в первом слое после входного, то — это просто .
Производная выходного значения нейрона по его входному значению — это просто частная производная функции активации (предполагается что в качестве функции активации используется сигмоида):
По этой причине данный метод требует дифференцируемой функции активации. (Тем не менее, функция ReLU стала достаточно популярной в последнее время, хоть и не дифференцируема в 0)
Первый множитель легко вычислим, если нейрон находится в выходном слое, ведь в таком случае и
Тем не менее, если произвольный внутренний слой сети, нахождение производной по менее очевидно.
Если рассмотреть как функцию, берущую на вход все нейроны получающие на вход значение нейрона ,
и взять полную производную по , то получим рекурсивное выражение для производной:
Следовательно, производная по может быть вычислена если все производные по выходным значениям следующего слоя известны.
Если собрать все месте:
и
Чтобы обновить вес используя градиентный спуск, нужно выбрать скорость обучения, . Изменение в весах должно отражать влияние на увеличение или уменьшение в . Если , увеличение увеличивает ; наоборот, если , увеличение уменьшает . Новый добавлен к старым весам, и произведение скорости обучения на градиент, умноженный на , гарантирует, что изменения будут всегда уменьшать . Другими словами, в следующем уравнении, всегда изменяет в такую сторону, что уменьшается:
Алгоритм
- — скорость обучения
- — коэффициент инерциальности для сглаживания резких скачков при перемещении по поверхности целевой функции
- — обучающее множество
- — количество повторений
- — функция, подающая x на вход сети и возвращающая выходные значения всех ее узлов
- — количество слоев в сети
- — множество нейронов в слое i
- — множество нейронов в выходном слое
fun BackPropagation:
init
repeat :
for = to :
=
for :
=
for = to :
for :
=
for :
=
=
return
Недостатки алгоритма
Несмотря на многочисленные успешные применения обратного распространения, оно не является универсальным решением. Больше всего неприятностей приносит неопределённо долгий процесс обучения. В сложных задачах для обучения сети могут потребоваться дни или даже недели, она может и вообще не обучиться. Причиной может быть одна из описанных ниже.
Градиентный спуск может найти локальный минимум вместо глобального
Паралич сети
В процессе обучения сети значения весов могут в результате коррекции стать очень большими величинами. Это может привести к тому, что все или большинство нейронов будут функционировать при очень больших выходных значениях, а производная активирующей функции будет очень мала. Так как посылаемая обратно в процессе обучения ошибка пропорциональна этой производной, то процесс обучения может практически замереть.
Локальные минимумы
Градиентный спуск с обратным распространением ошибок гарантирует нахождение только локального минимума функции; также, возникают проблемы с пересечением плато на поверхности функции ошибки.
Примечания
- Алгоритм обучения многослойной нейронной сети методом обратного распространения ошибки
- Neural Nets
- Understanding backpropagation
См. также
- Нейронные сети, перцептрон
- Стохастический градиентный спуск
- Настройка глубокой сети
- Практики реализации нейронных сетей
Источники информации
- https://en.wikipedia.org/wiki/Backpropagation
- https://ru.wikipedia.org/wiki/Метод_обратного_распространения_ошибки
Рад снова всех приветствовать, и сегодня продолжим планомерно двигаться в выбранном направлении. Речь, конечно, о масштабном разборе искусственных нейронных сетей для решения широкого спектра задач. Продолжим ровно с того момента, на котором остановились в предыдущей части, и это означает, что героем данного поста будет ключевой процесс — обучение нейронных сетей.
Тема эта крайне важна, поскольку именно процесс обучения позволяет сети начать выполнять задачу, для которой она, собственно, и предназначена. То есть нейронная сеть функционирует не по какому-либо жестко заданному на этапе проектирования алгоритму, она совершенствуется в процессе анализа имеющихся данных. Этот процесс и называется обучением нейронной сети. Математически суть процесса обучения заключается в корректировке значений весов синапсов (связей между имеющимися нейронами). Изначально значения весов задаются случайно, затем производится обучение, результатом которого будут новые значения синаптических весов. Это все мы максимально подробно разберем как раз в этой статье.
На своем сайте я всегда придерживаюсь концепции, при которой теоретические выкладки по максимуму сопровождаются практическими примерами для максимальной наглядности. Так мы поступим и сейчас 👍
Итак, суть заключается в следующем. Пусть у нас есть простейшая нейронная сеть, которую мы хотим обучить (продолжаем рассматривать сети прямого распространения):

То есть на входы нейронов I1 и I2 мы подаем какие-либо числа, а на выходе сети получаем соответственно новое значение. При этом нам необходима некая выборка данных, включающая в себя значения входов и соответствующее им, правильное, значение на выходе:
| bold{I_1} | bold{I_2} | bold{O_{net}} |
|---|---|---|
| x_{11} | x_{12} | y_{1} |
| x_{21} | x_{22} | y_{2} |
| x_{31} | x_{32} | y_{3} |
| … | … | … |
| x_{N1} | x_{N2} | y_{N} |
Допустим, сеть выполняет суммирование значений на входе, тогда данный набор данных может быть таким:
| bold{I_1} | bold{I_2} | bold{O_{net}} |
|---|---|---|
| 1 | 4 | 5 |
| 2 | 7 | 9 |
| 3 | 5 | 8 |
| … | … | … |
| 1000 | 1500 | 2500 |
Эти значения и используются для обучения сети. Как именно — рассмотрим чуть ниже, пока сконцентрируемся на идее процесса в целом. Для того, чтобы иметь возможность тестировать работу сети в процессе обучения, исходную выборку данных делят на две части — обучающую и тестовую. Пусть имеется 1000 образцов, тогда можно 900 использовать для обучения, а оставшиеся 100 — для тестирования. Эти величины взяты исключительно ради наглядности и демонстрации логики выполнения операций, на практике все зависит от задачи, размер обучающей выборки может спокойно достигать и сотен тысяч образцов.
Итак, итог имеем следующий — обучающая выборка прогоняется через сеть, в результате чего происходит настройка значений синаптических весов. Один полный проход по всей выборке называется эпохой. И опять же, обучение нейронной сети — это процесс, требующий многократных экспериментов, анализа результатов и творческого подхода. Все перечисленные параметры (размер выборки, количество эпох обучения) могут иметь абсолютно разные значения для разных задач и сетей. Четкого правила тут просто нет, в этом и кроется дополнительный шарм и изящность )
Возвращаемся к разбору, и в результате прохода обучающей выборки через сеть мы получаем сеть с новыми значениями весов синапсов.
Далее мы через эту, уже обученную в той или иной степени, сеть прогоняем тестовую выборку, которая не участвовала в обучении. При этом сеть выдает нам выходные значения для каждого образца, которые мы сравниваем с теми верными значениями, которые имеем.
Анализируем нашу гипотетическую выборку:

Таким образом, для тестирования подаем на вход сети значения x_{(M+1)1}, x_{(M+1)2} и проверяем, чему равен выход, ожидаем очевидно значение y_{(M+1)}. Аналогично поступаем и для оставшихся тестовых образцов. После чего мы можем сделать вывод, успешно или нет работает сеть. Например, сеть дает правильный ответ для 90% тестовых данных, дальше уже встает вопрос — устраивает ли нас данная точность или процесс обучения необходимо повторить, либо провести заново, изменив какие-либо параметры сети.
В этом и заключается суть обучения нейронных сетей, теперь перейдем к деталям и конкретным действиям, которые необходимо осуществить для выполнения данного процесса. Двигаться снова будем поэтапно, чтобы сформировать максимально четкую и полную картину. Поэтому начнем с понятия градиентного спуска, который используется при обучении по методу обратного распространения ошибки. Обо всем этом далее…
Обучение нейронных сетей. Градиентный спуск.
Рассмотрев идею процесса обучения в целом, на данном этапе мы можем однозначно сформулировать текущую цель — необходимо определить математический алгоритм, который позволит рассчитать значения весовых коэффициентов таким образом, чтобы ошибка сети была минимальна. То есть грубо говоря нам необходима конкретная формула для вычисления:
Здесь Delta w_{ij} — величина, на которую необходимо изменить вес синапса, связывающего нейроны i и j нашей сети. Соответственно, зная это, необходимо на каждом этапе обучения производить корректировку весов связей между всеми элементами нейронной сети. Задача ясна, переходим к делу.
Пусть функция ошибки от веса имеет следующий вид:
Для удобства рассмотрим зависимость функции ошибки от одного конкретного веса:

В начальный момент мы находимся в некоторой точке кривой, а для минимизации ошибки попасть мы хотим в точку глобального минимума функции:
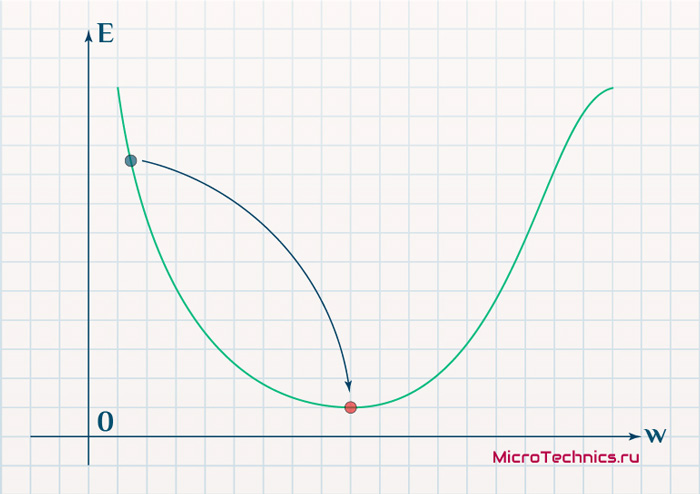
Нанесем на график вектора градиентов в разных точках. Длина векторов численно равна скорости роста функции в данной точке, что в свою очередь соответствует значению производной функции по данной точке. Исходя из этого, делаем вывод, что длина вектора градиента определяется крутизной функции в данной точке:
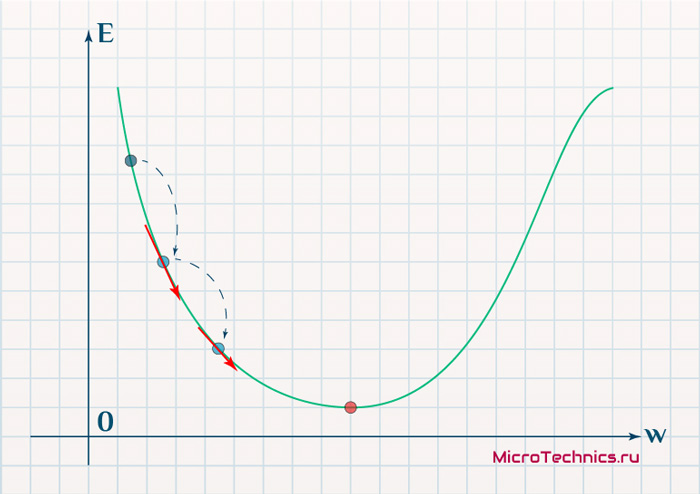
Вывод прост — величина градиента будет уменьшаться по мере приближения к минимуму функции. Это важный вывод, к которому мы еще вернемся. А тем временем разберемся с направлением вектора, для чего рассмотрим еще несколько возможных точек:
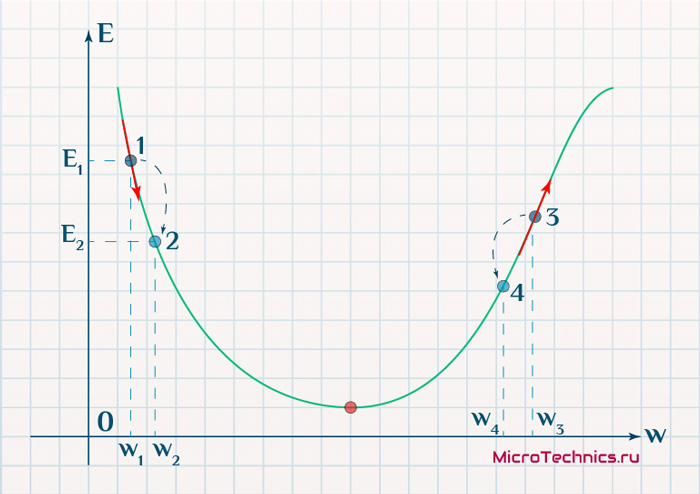
Находясь в точке 1, целью является перейти в точку 2, поскольку в ней значение ошибки меньше (E_2 < E_1), а глобальная задача по-прежнему заключается в ее минимизации. Для этого необходимо изменить величину w на некое значение Delta w (Delta w = w_2 — w_1 > 0). При всем при этом в точке 1 градиент отрицательный. Фиксируем данные факты и переходим к точке 3, предположим, что мы находимся именно в ней.
Тогда для уменьшения ошибки наш путь лежит в точку 4, а необходимое изменение значения: Delta w = w_4 — w_3 < 0. Градиент же в точке 3 положителен. Этот факт также фиксируем.
А теперь соберем воедино эту информацию в виде следующей иллюстрации:
| Переход | bold{Delta w} | Знак bold{Delta w} | Градиент |
|---|---|---|---|
| 1 rArr 2 | w_2 — w_1 | + | — |
| 3 rArr 4 | w_4 — w_3 | — | + |
Вывод напрашивается сам собой — величина, на которую необходимо изменить значение w, в любой точке противоположна по знаку градиенту. И, таким образом, представим эту самую величину в виде:
Delta w = -alpha cdot frac{dE}{dw}
Имеем в наличии:
- Delta w — величина, на которую необходимо изменить значение w.
- frac{dE}{dw} — градиент в этой точке.
- alpha — скорость обучения.
Собственно, логика метода градиентного спуска и заключается в данном математическом выражении, а именно в том, что для минимизации ошибки необходимо изменять w в направлении противоположном градиенту. В контексте нейронных сетей имеем искомый закон для корректировки весов синаптических связей (для синапса между нейронами i и j):
Delta w_{ij} = -alpha cdot frac{dE}{dw_{ij}}
Более того, вспомним о важном свойстве, которое мы отдельно пометили. И заключается оно в том, что величина градиента будет уменьшаться по мере приближения к минимуму функции. Что это нам дает? А то, что в том случае, если наша текущая дислокация далека от места назначения, то величина, корректирующая вес связи, будет больше. А это обеспечит скорейшее приближение к цели. При приближении к целевому пункту, величина frac{dE}{dw_{ij}} будет уменьшаться, что поможет нам точнее попасть в нужную точку, а кроме того, не позволит нам ее проскочить. Визуализируем вышеописанное:
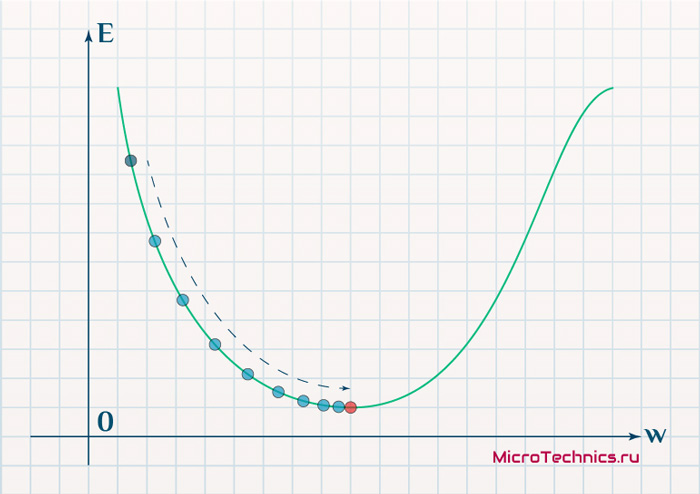
Скорость же обучения несет в себе следующий смысл. Она определяет величину каждого шага при поиске минимума ошибки. Слишком большое значение приводит к тому, что точка может «перепрыгнуть» через нужное значение и оказаться по другую сторону от цели:
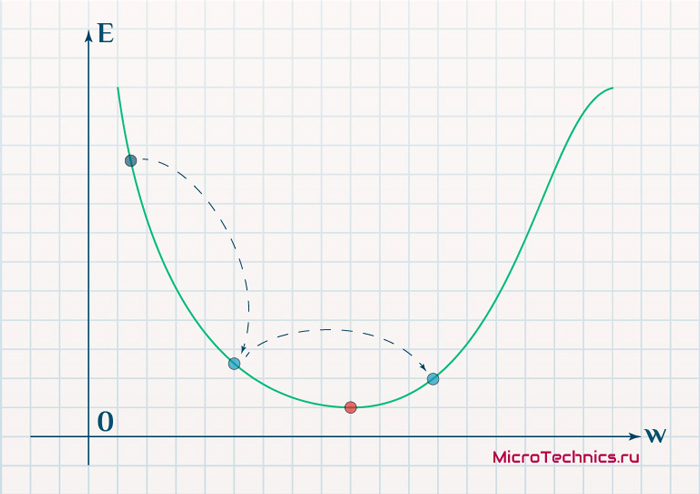
Если же величина будет мала, то это приведет к тому, что спуск будет осуществляться очень медленно, что также является нежелательным эффектом. Поэтому скорость обучения, как и многие другие параметры нейронной сети, является очень важной величиной, для которой нет единственно верного значения. Все снова зависит от конкретного случая и оптимальная величина определяется исключительно исходя из текущих условий.
И даже на этом еще не все, здесь присутствует один важный нюанс, который в большинстве статей опускается, либо вовсе не упоминается. Реальная зависимость может иметь совсем другой вид:
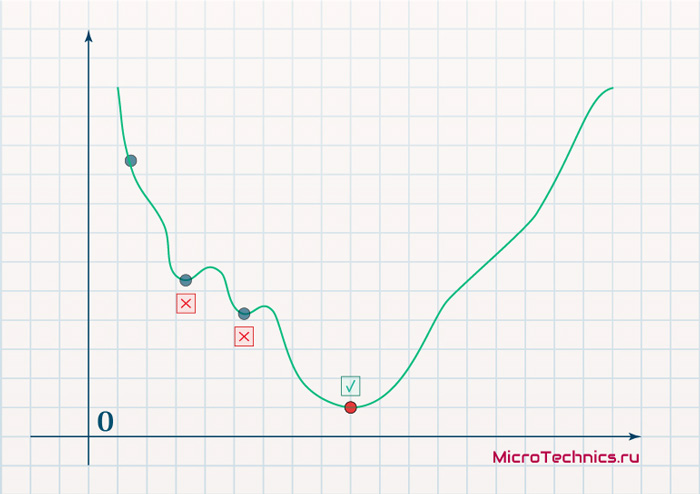
Из чего вытекает потенциальная возможность попадания в локальный минимум, вместо глобального, что является большой проблемой. Для предотвращения данного эффекта вводится понятие момента обучения и формула принимает следующий вид:
Delta w_{ij} = -alpha cdot frac{dE}{dw_{ij}} + gamma cdot Delta w_{ij}^{t - 1}
То есть добавляется второе слагаемое, которое представляет из себя произведение момента на величину корректировки веса на предыдущем шаге.
Итого, резюмируем продвижение к цели:
- Нашей задачей было найти закон, по которому необходимо изменять величину весов связей между нейронами.
- Наш результат — Delta w_{ij} = -alpha cdot frac{dE}{dw_{ij}} + gamma cdot Delta w_{ij}^{t — 1} — именно то, что и требовалось 👍
И опять же, полученный результат логичным образом перенаправляет нас на следующий этап, ставя вопросы — что из себя представляет функция ошибки, и как определить ее градиент.
Обучение нейронных сетей. Функция ошибки.
Начнем с того, что определимся с тем, что у нас в наличии, для этого вернемся к конкретной нейронной сети. Пусть вид ее таков:
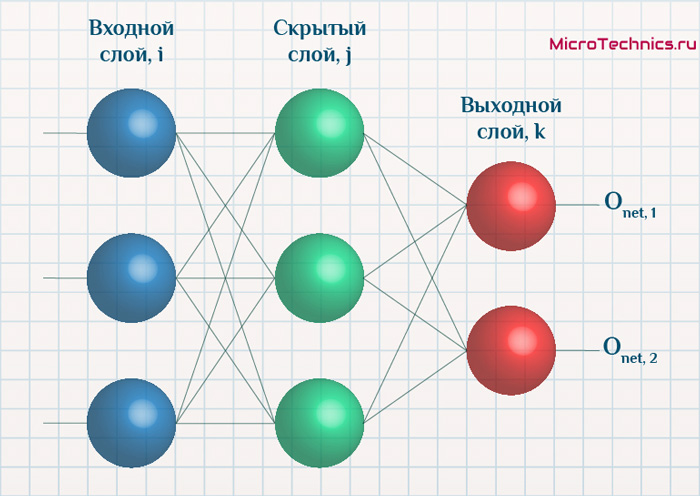
Интересует нас, в первую очередь, часть, относящаяся к нейронам выходного слоя. Подав на вход определенные значения, получаем значения на выходе сети: O_{net, 1} и O_{net, 2}. Кроме того, поскольку мы ведем речь о процессе обучения нейронной сети, то нам известны целевые значения: O_{correct, 1} и O_{correct, 2}. И именно этот набор данных на этом этапе является для нас исходным:
- Известно: O_{net, 1}, O_{net, 2}, O_{correct, 1} и O_{correct, 2}.
- Необходимо определить величины Delta w_{ij} для корректировки весов, для этого нужно вычислить градиенты (frac{dE}{dw_{ij}}) для каждого из синапсов.
Полдела сделано — задача четко сформулирована, начинаем деятельность по поиску решения.
В плане того, как определять ошибку, первым и самым очевидным вариантом кажется простая алгебраическая разность. Для каждого из выходных нейронов:
E_k = O_{correct, k} - O_{net, k}
Дополним пример числовыми значениями:
| Нейрон | bold{O_{net}} | bold{O_{correct}} | bold{E} |
|---|---|---|---|
| 1 | 0.9 | 0.5 | -0.4 |
| 2 | 0.2 | 0.6 | 0.4 |
Недостатком данного варианта является то, что в том случае, если мы попытаемся просуммировать ошибки нейронов, то получим:
E_{sum} = e_1 + e_2 = -0.4 + 0.4 = 0
Что не соответствует действительности (нулевая ошибка, говорит об идеальной работе нейронной сети, по факту оба нейрона дали неверный результат). Так что вариант с разностью откидываем за несостоятельностью.
Вторым, традиционно упоминаемым, методом вычисления ошибки является использование модуля разности:
E_k = | O_{correct, k} - O_{net, k} |
Тут в действие вступает уже проблема иного рода:
Функция, бесспорно, симпатична, но при приближении к минимуму ее градиент является постоянной величиной, скачкообразно меняясь при переходе через точку минимума. Это нас также не устраивает, поскольку, как мы обсуждали, концепция заключалась в том числе в том, чтобы по мере приближения к минимуму значение градиента уменьшалось.
В итоге хороший результат дает зависимость (для выходного нейрона под номером k):
E_k = (O_{correct, k} - O_{net, k})^2
Функция по многим своим свойствам идеально удовлетворяет нуждам обучения нейронной сети, так что выбор сделан, остановимся на ней. Хотя, как и во многих аспектах, качающихся нейронных сетей, данное решение не является единственно и неоспоримо верным. В каких-то случаях лучше себя могут проявить другие зависимости, возможно, что какой-то вариант даст большую точность, но неоправданно высокие затраты производительности при обучении. В общем, непаханное поле для экспериментов и исследований, это и привлекательно.
Краткий вывод промежуточного шага, на который мы вышли:
- Имеющееся: frac{dE}{dw_{jk}} = frac{d}{d w_{jk}}(O_{correct, k} — O_{net, k})^2.
- Искомое по-прежнему: Delta w_{jk}.
Несложные диффернциально-математические изыскания выводят на следующий результат:
frac{dE}{d w_{jk}} = -(O_{correct, k} - O_{net, k}) cdot f{Large{prime}}(sum_{j}w_{jk}O_j) cdot O_j
Здесь эти самые изыскания я все-таки решил не вставлять, дабы не перегружать статью, которая и так выходит объемной. Но в случае необходимости и интереса, отпишите в комментарии, я добавлю вычисления и закину их под спойлер, как вариант.
Освежим в памяти структуру сети:
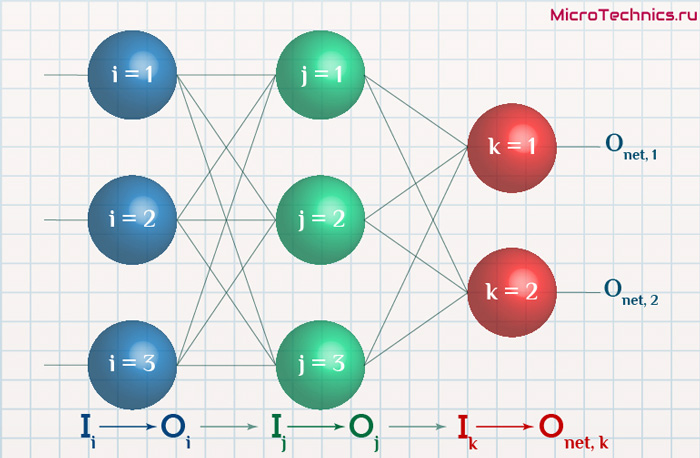
Формулу можно упростить, сгруппировав отдельные ее части:
- (O_{correct, k} — O_{net, k}) cdot f{Large{prime}}(sum_{j}w_{jk}O_j) — ошибка нейрона k.
- O_j — тут все понятно, выходной сигнал нейрона j.
f{Large{prime}}(sum_{j}w_{jk}O_j) — значение производной функции активации. Причем, обратите внимание, что sum_{j}w_{jk}O_j — это не что иное, как сигнал на входе нейрона k (I_{k}). Тогда для расчета ошибки выходного нейрона: delta_k = (O_{correct, k} — O_{net, k}) cdot f{Large{prime}}(I_k).
Итог: frac{dE}{d w_{jk}} = -delta_k cdot O_j.
Одной из причин популярности сигмоидальной функции активности является то, что ее производная очень просто выражается через саму функцию:
f{'}(x) = f(x)medspace (1medspace-medspace f(x))
Данные алгебраические вычисления справедливы для корректировки весов между скрытым и выходным слоем, поскольку для расчета ошибки мы используем просто разность между целевым и полученным результатом, умноженную на производную.
Для других слоев будут незначительные изменения, касающиеся исключительно первого множителя в формуле:
frac{dE}{d w_{ij}} = -delta_j cdot O_i
Который примет следующий вид:
delta_j = (sum_{k}{}{delta_kmedspace w_{jk}}) cdot f{Large{prime}}(I_j)
То есть ошибка для элемента слоя j получается путем взвешенного суммирования ошибок, «приходящих» к нему от нейронов следующего слоя и умножения на производную функции активации. В результате:
frac{dE}{d w_{ij}} = -(sum_{k}{}{delta_kmedspace w_{jk}}) cdot f{Large{prime}}(I_j) cdot O_i
Снова подводим промежуточный итог, чтобы иметь максимально полную и структурированную картину происходящего. Вот результаты, полученные нами на двух этапах, которые мы успешно миновали:
- Ошибка:
- выходной слой: delta_k = (O_{correct, k} — O_{net, k}) cdot f{Large{prime}}(I_k)
- скрытые слои: delta_j = (sum_{k}{}{delta_kmedspace w_{jk}}) cdot f{Large{prime}}(I_j)
- Градиент: frac{dE}{d w_{ij}} = -delta_j cdot O_i
- Корректировка весовых коэффициентов: Delta w_{ij} = -alpha cdot frac{dE}{dw_{ij}} + gamma cdot Delta w_{ij}^{t — 1}
Преобразуем последнюю формулу:
Delta w_{ij} = alpha cdot delta_j cdot O_i + gamma cdot Delta w_{ij}^{t - 1}
Из этого мы делаем вывод, что на данный момент у нас есть все, что необходимо для того, чтобы произвести обучение нейронной сети. И героем следующего подраздела будет алгоритм обратного распространения ошибки.
Метод обратного распространения ошибки.
Данный метод является одним из наиболее распространенных и популярных, чем и продиктован его выбор для анализа и разбора. Алгоритм обратного распространения ошибки относится к методам обучение с учителем, что на деле означает необходимость наличия целевых значений в обучающих сетах.
Суть же метода подразумевает наличие двух этапов:
- Прямой проход — входные сигналы двигаются в прямом направлении, в результате чего мы получаем выходной сигнал, из которого в дальнейшем рассчитываем значение ошибки.
- Обратный проход — обратное распространение ошибки — величина ошибки двигается в обратном направлении, в результате происходит корректировка весовых коэффициентов связей сети.
Начальные значения весов (перед обучением) задаются случайными, есть ряд методик для выбора этих значений, я опишу в отдельном материале максимально подробно. Пока вот можно полистать — ссылка.
Вернемся к конкретному примеру для явной демонстрации этих принципов:
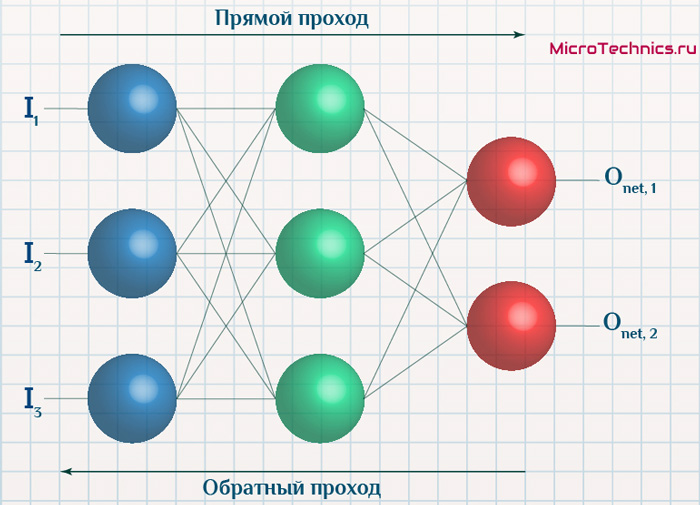
Итак, имеется нейронная сеть, также имеется набор данных обучающей выборки. Как уже обсудили в начале статьи — обучающая выборка представляет из себя набор образцов (сетов), каждый из которых состоит из значений входных сигналов и соответствующих им «правильных» значений выходных величин.
Процесс обучения нейронной сети для алгоритма обратного распространения ошибки будет таким:
- Прямой проход. Подаем на вход значения I_1, I_2, I_3 из обучающей выборки. В результате работы сети получаем выходные значения O_{net, 1}, O_{net, 2}. Этому целиком и полностью был посвящен предыдущий манускрипт.
- Рассчитываем величины ошибок для всех слоев:
- для выходного: delta_k = (O_{correct, k} — O_{net, k}) cdot f{Large{prime}}(I_k)
- для скрытых: delta_j = (sum_{k}{}{delta_kmedspace w_{jk}}) cdot f{Large{prime}}(I_j)
- Далее используем полученные значения для расчета Delta w_{ij} = alpha cdot delta_j cdot O_i + gamma cdot Delta w_{ij}^{t — 1}
- И финишируем, рассчитывая новые значения весов: w_{ij medspace new} = w_{ij} + Delta w_{ij}
- На этом один цикл обучения закончен, данные шаги 1 — 4 повторяются для других образцов из обучающей выборки.
Обратный проход завершен, а вместе с ним и одна итерация процесса обучения нейронной сети по данному методу. Собственно, обучение в целом заключается в многократном повторении этих шагов для разных образцов из обучающей выборки. Логику мы полностью разобрали, при повторном проведении операций она остается в точности такой же.
Таким образом, максимально подробно концентрируясь именно на сути и логике процессов, мы в деталях разобрали метод обратного распространения ошибки. Поэтому переходим к завершающей части статьи, в которой разберем практический пример, произведя полностью все вычисления для конкретных числовых величин. Все в рамках продвигаемой мной концепции, что любая теоретическая информация на порядок лучше может быть осознана при применении ее на практике.
Пример расчетов для метода обратного распространения ошибки.
Возьмем нейронную сеть и зададим начальные значения весов:
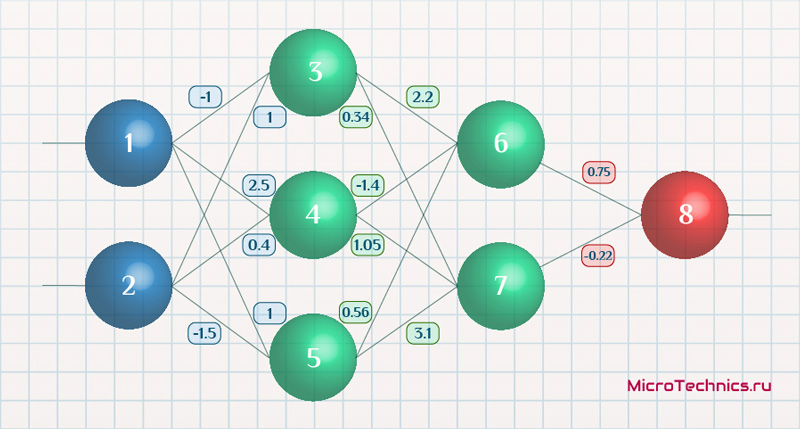
Здесь я задал значения не в соответствии с существующими на сегодняшний день методами, а просто случайным образом для наглядности примера.
В качестве функции активации используем сигмоиду:
f(x) = frac{1}{1 + e^{-x}}
И ее производная:
f{Large{prime}}(x) = f(x)medspace (1medspace-medspace f(x))
Берем один образец из обучающей выборки, пусть будут такие значения:
- Входные: I_1 = 0.6, I_1 = 0.7.
- Выходное: O_{correct} = 0.9.
Скорость обучения alpha пусть будет равна 0.3, момент — gamma = 0.1. Все готово, теперь проведем полный цикл для метода обратного распространения ошибки, то есть прямой проход и обратный.
Прямой проход.
Начинаем с выходных значений нейронов 1 и 2, поскольку они являются входными, то:
O_1 = I_1 = 0.6 \ O_2 = I_2 = 0.7
Значения на входе нейронов 3, 4 и 5:
I_3 = O_1 cdot w_{13} + O_2 cdot w_{23} = 0.6 cdot (-1medspace) + 0.7 cdot 1 = 0.1 \
I_4 = 0.6 cdot 2.5 + 0.7 cdot 0.4 = 1.78 \
I_5 = 0.6 cdot 1 + 0.7 cdot (-1.5medspace) = -0.45
На выходе этих же нейронов первого скрытого слоя:
O_3 = f(I3medspace) = 0.52 \ O_4 = 0.86\ O_5 = 0.39
Продолжаем аналогично для следующего скрытого слоя:
I_6 = O_3 cdot w_{36} + O_4 cdot w_{46} + O_5 cdot w_{56} = 0.52 cdot 2.2 + 0.86 cdot (-1.4medspace) + 0.39 cdot 0.56 = 0.158 \
I_7 = 0.52 cdot 0.34 + 0.86 cdot 1.05 + 0.39 cdot 3.1 = 2.288 \
O_6 = f(I_6) = 0.54 \
O_7 = 0.908
Добрались до выходного нейрона:
I_8 = O_6 cdot w_{68} + O_7 cdot w_{78} = 0.54 cdot 0.75 + 0.908 cdot (-0.22medspace) = 0.205 \
O_8 = O_{net} = f(I_8) = 0.551
Получили значение на выходе сети, кроме того, у нас есть целевое значение O_{correct} = 0.9. То есть все, что необходимо для обратного прохода, имеется.
Обратный проход.
Как мы и обсуждали, первым этапом будет вычисление ошибок всех нейронов, действуем:
delta_8 = (O_{correct} - O_{net}) cdot f{Large{prime}}(I_8) = (O_{correct} - O_{net}) cdot f(I_8) cdot (1-f(I_8)) = (0.9 - 0.551medspace) cdot 0.551 cdot (1-0.551medspace) = 0.0863 \
delta_7 = (sum_{k}{}{delta_kmedspace w_{jk}}) cdot f{Large{prime}}(I_7) = (delta_8 cdot w_{78}) cdot f{Large{prime}}(I_7) = 0.0863 cdot (-0.22medspace) cdot 0.908 cdot (1 - 0.908medspace) = -0.0016 \
delta_6 = 0.086 cdot 0.75 cdot 0.54 cdot (1 - 0.54medspace) = 0.016 \
delta_5 = (sum_{k}{}{delta_kmedspace w_{jk}}) cdot f{Large{prime}}(I_5) = (delta_7 cdot w_{57} + delta_6 cdot w_{56}) cdot f{Large{prime}}(I_7) = (-0.0016 cdot 3.1 + 0.016 cdot 0.56) cdot 0.39 cdot (1 - 0.39medspace) = 0.001 \
delta_4 = (-0.0016 cdot 1.05 + 0.016 cdot (-1.4)) cdot 0.86 cdot (1 - 0.86medspace) = -0.003 \
delta_3 = (-0.0016 cdot 0.34 + 0.016 cdot 2.2) cdot 0.52 cdot (1 - 0.52medspace) = -0.0087
С расчетом ошибок закончили, следующий этап — расчет корректировочных величин для весов всех связей. Для этого мы вывели формулу:
Delta w_{ij} = alpha cdot delta_j cdot O_i + gamma cdot Delta w_{ij}^{t - 1}
Как вы помните, Delta w_{ij}^{t — 1} — это величина поправки для данного веса на предыдущей итерации. Но поскольку у нас это первый проход, то данное значение будет нулевым, соответственно, в данном случае второе слагаемое отпадает. Но забывать о нем нельзя. Продолжаем калькулировать:
Delta w_{78} = alpha cdot delta_8 cdot O_7 = 0.3 cdot 0.0863 cdot 0.908 = 0.0235 \
Delta w_{68} = 0.3 cdot 0.0863 cdot 0.54= 0.014 \
Delta w_{57} = alpha cdot delta_7 cdot O_5 = 0.3 cdot (−0.0016medspace) cdot 0.39= -0.00019 \
Delta w_{47} = 0.3 cdot (−0.0016medspace) cdot 0.86= -0.0004 \
Delta w_{37} = 0.3 cdot (−0.0016medspace) cdot 0.52= -0.00025 \
Delta w_{56} = alpha cdot delta_6 cdot O_5 = 0.3 cdot 0.016 cdot 0.39= 0.0019 \
Delta w_{46} = 0.3 cdot 0.016 cdot 0.86= 0.0041 \
Delta w_{36} = 0.3 cdot 0.016 cdot 0.52= 0.0025 \
Delta w_{25} = alpha cdot delta_5 cdot O_2 = 0.3 cdot 0.001 cdot 0.7= 0.00021 \
Delta w_{15} = 0.3 cdot 0.001 cdot 0.6= 0.00018 \
Delta w_{24} = alpha cdot delta_4 cdot O_2 = 0.3 cdot (-0.003medspace) cdot 0.7= -0.00063 \
Delta w_{14} = 0.3 cdot (-0.003medspace) cdot 0.6= -0.00054 \
Delta w_{23} = alpha cdot delta_3 cdot O_2 = 0.3 cdot (−0.0087medspace) cdot 0.7= -0.00183 \
Delta w_{13} = 0.3 cdot (−0.0087medspace) cdot 0.6= -0.00157
И самый что ни на есть заключительный этап — непосредственно изменение значений весовых коэффициентов:
w_{78 medspace new} = w_{78} + Delta w_{78} = -0.22 + 0.0235 = -0.1965 \
w_{68 medspace new} = 0.75+ 0.014 = 0.764 \
w_{57 medspace new} = 3.1 + (−0.00019medspace) = 3.0998\
w_{47 medspace new} = 1.05 + (−0.0004medspace) = 1.0496\
w_{37 medspace new} = 0.34 + (−0.00025medspace) = 0.3398\
w_{56 medspace new} = 0.56 + 0.0019 = 0.5619 \
w_{46 medspace new} = -1.4 + 0.0041 = -1.3959 \
w_{36 medspace new} = 2.2 + 0.0025 = 2.2025 \
w_{25 medspace new} = -1.5 + 0.00021 = -1.4998 \
w_{15 medspace new} = 1 + 0.00018 = 1.00018 \
w_{24 medspace new} = 0.4 + (−0.00063medspace) = 0.39937 \
w_{14 medspace new} = 2.5 + (−0.00054medspace) = 2.49946 \
w_{23 medspace new} = 1 + (−0.00183medspace) = 0.99817 \
w_{13 medspace new} = -1 + (−0.00157medspace) = -1.00157\
И на этом данную масштабную статью завершаем, конечно же, не завершая на этом деятельность по использованию нейронных сетей. Так что всем спасибо за прочтение, любые вопросы пишите в комментариях и на форуме, ну и обязательно следите за обновлениями и новыми материалами, до встречи!
Нейронная сеть — введение
Принцип обучения многослойной нейронной сети с помощью алгоритма обратного распространения
Рассмотрим процесс обучения нейронной сети с использованием алгоритма обратного распространения ошибки (backpropagation).
Для иллюстрации этого процесса используем нейронную сеть состоящую из трёх слоёв и имеющую два входа и один выход:
здесь, автор считает слои по-другому и не учитывает «2 нейрона» входного слоя

Каждый нейрон состоит из двух элементов.
Первый элемент – дендриты — добавляют весовые коэффициенты ко входным сигналам.
Второй элемент – тело — реализует нелинейную функцию, т.н. функцию активации нейрона.
Сигнал е – это взвешенная сумма входных сигналов
у = f (е)
— выходной сигнал нейрона.
Чтобы обучить нейронную сеть мы должны подготовить обучающие данные(примеры).
В нашем случае, тренировочные данные состоят из входных сигналов (х1 и х2) и желаемого результата z.
Обучение – это последовательность итераций (повторений).
В каждой итерации весовые коэффициенты нейронов подгоняются с использованием новых данных из тренировочных примеров.
Изменение весовых коэффициентов и составляют суть алгоритма, описанного ниже.
Каждый шаг обучения начинается с воздействия входных сигналов из тренировочных примеров. После этого мы можем определить значения выходных сигналов для всех нейронов в каждом слое сети.
Иллюстрации ниже показывают, как сигнал распространяется по сети.
Символы W(Xm)n представляют вес связи между сетевым входом Xm и нейрона n во входном слое.
Символы y(n) представляют выходной сигнал нейрона n.
Распространение сигнала через скрытый слой.
Символы Wmn представляют весовые множители связей между выходом нейрона m и входом нейрона n в следующем слое.
Распространение сигнала через выходной слой
На следующем шаге алгоритма, выходной сигнала сети y сравнивается с желаемым выходным сигналом z, который хранится в тренировочных данных.
Разница между этими двумя сигналами называется ошибкой d выходного слоя сети.
Невозможно непосредственно вычислить сигнал ошибки для внутренних нейронов, потому что выходные значения этих нейронов, неизвестны.
На протяжении многих лет был неизвестен эффективный метод для обучения многослойной сети.
Только в середине восьмидесятых годов был разработан алгоритм обратного распространения ошибки.
Идея заключается в распространении сигнала ошибки d (вычисленного в шаге обучения) обратно на все нейроны, чьи выходные сигналы были входящими для последнего нейрона.

Весовые коэффициенты Wmn, используемые для обратного распространения ошибки, равны тем же коэффициентам, что использовались во время вычисления выходного сигнала. Только изменяется направление потока данных (сигналы передаются от выхода ко входу).
Этот процесс повторяется для всех слоёв сети. Если ошибка пришла от нескольких нейронов — она суммируются:
Когда вычисляется величина ошибки сигнала для каждого нейрона – можно скорректировать весовые коэффициенты каждого узла ввода(дендрита) нейрона.
В формулах ниже df(e)/de — является производной от функции активации нейрона (чьи весовые коэффициенты корректируются).
как помним, для активационной функции типа сигмоид
1 S(x) = ----------- 1 + exp(-x)производная выражается через саму функцию:
S'(x) = S(x)*(1 - S(x)), что позволяет существенно сократить вычислительную сложность метода обратного распространения ошибки.
Вычисление производной необходимо, потому что для корректировки весовых коэффициентов при обучении ИНС с помощью алгоритма обратного распространения, используется метод градиентного спуска.

Коэффициент h влияет на скорость обучения сети.
Есть несколько методов для выбора этого параметра.
Первый способ — начать учебный процесс с большим значением параметра h. Во время коррекции весовых коэффициентов, параметр постепенно уменьшают.
Второй — более сложный метод обучения, начинается с малым значением параметра h. В процессе обучения параметр увеличивается, а затем вновь уменьшается на завершающей стадии обучения.
Начало учебного процесса с низким значением параметра h позволяет определить знак весовых коэффициентов.
продолжение следует…
Ссылки
Оригинал статьи (на английском)
http://ru.wikipedia.org/wiki/Метод_обратного_распространения_ошибки
http://en.wikipedia.org/wiki/Backpropagation
Нейросеть в 11 строчек на Python
An overview of gradient descent optimization algorithms
По теме
Нейронная сеть — введение
Пример работы самоорганизующейся инкрементной нейронной сети SOINN
Применение алгоритма обратного распространения ошибки — один из известных методов, используемых для глубокого обучения нейронных сетей прямого распространения (такие сети ещё называют многослойными персептронами). Этот метод относят к методу обучения с учителем, поэтому требуется задавать в обучающих примерах целевые значения. В этой статье мы рассмотрим, что собой представляет метод обратного распространения ошибки, как он реализуется, каковы его плюсы и минусы.
Сегодня нейронные сети прямого распространения используются для решения множества сложных задач. Если говорить об обучении нейронных сетей методом обратного распространения, то тут пользуются двумя проходами по всем слоям нейросети: прямым и обратным. При выполнении прямого прохода осуществляется подача входного вектора на входной слой сети, после чего происходит распространение по нейронной сети от слоя к слою. В итоге должна осуществляться генерация набора выходных сигналов — именно он, по сути, является реакцией нейронной сети на этот входной образ. При прямом проходе все синаптические веса нейросети фиксированы. При обратном проходе все синаптические веса настраиваются согласно правил коррекции ошибок, когда фактический выход нейронной сети вычитается из желаемого, что приводит к формированию сигнала ошибки. Такой сигнал в дальнейшем распространяется по сети, причём направление распространения обратно направлению синаптических связей. Именно поэтому соответствующий метод и называют алгоритмом с обратно распространённой ошибкой. Синаптические веса настраивают с целью наибольшего приближения выходного сигнала нейронной сети к желаемому.
Общее описание алгоритма обратного распространения ошибки
К примеру, нам надо обучить нейронную сеть по аналогии с той, что представлена на картинке ниже. Естественно, задачу следует выполнить, применяя алгоритм обратного распространения ошибки:
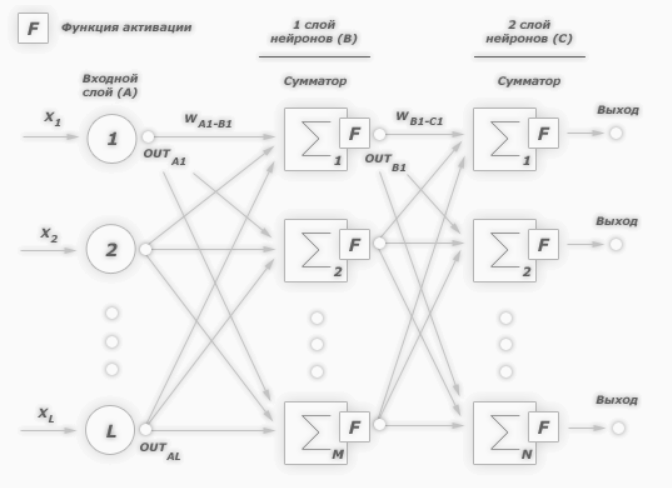
В многослойных персептронах в роли активационной функции обычно применяют сигмоидальную активационную функция, в нашем случае — логистическую. Формула:

Причём «альфа» здесь означает параметр наклона сигмоидальной функции. Меняя его, мы получаем возможность строить функции с разной крутизной.
Сигмоид может сужать диапазон изменения таким образом, чтобы значение OUT лежало между нулем и единицей. Нейронные многослойные сети характеризуются более высокой представляющей мощностью, если сравнивать их с однослойными, но это утверждение справедливо лишь в случае нелинейности. Нужную нелинейность и обеспечивает сжимающая функция. Но на практике существует много функций, которые можно использовать. Говоря о работе алгоритма обратного распространения ошибки, скажем, что для этого нужно лишь, чтобы функция была везде дифференцируема, а данному требованию как раз и удовлетворяет сигмоид. У него есть и дополнительное преимущество — автоматический контроль усиления. Если речь идёт о слабых сигналах (OUT близко к нулю), то кривая «вход-выход» характеризуется сильным наклоном, дающим большое усиление. При увеличении сигнала усиление падает. В результате большие сигналы будут восприниматься сетью без насыщения, а слабые сигналы будут проходить по сети без чрезмерного ослабления.
Цель обучения сети
Цель обучения нейросети при использовании алгоритма обратного распространения ошибки — это такая подстройка весов нейросети, которая позволит при приложении некоторого множества входов получить требуемое множество выходов нейронов (выходных нейронов). Можно назвать эти множества входов и выходов векторами. В процессе обучения предполагается, что для любого входного вектора существует целевой вектор, парный входному и задающий требуемый выход. Эту пару называют обучающей. Работая с нейросетями, мы обучаем их на многих парах.
Также можно сказать, что алгоритм использует стохастический градиентный спуск и продвигается в многомерном пространстве весов в направлении антиградиента, причём цель — это достижение минимума функции ошибки.
При практическом применении метода обучение продолжают не до максимально точной настройки нейросети на минимум функции ошибки, а пока не будет достигнуто довольно точное его приближение. С одной стороны, это даёт возможность уменьшить количество итераций обучения, с другой — избежать переобучения нейронной сети.
Пошаговая реализация метода обратного распространения ошибки
Необходимо выполнить следующие действия:
1. Инициализировать синаптические веса случайными маленькими значениями.
2. Выбрать из обучающего множества очередную обучающую пару; подать на вход сети входной вектор.
3. Выполнить вычисление выходных значений нейронной сети.
4. Посчитать разность между выходом нейросети и требуемым выходом (речь идёт о целевом векторе обучающей пары).
5. Скорректировать веса сети в целях минимизации ошибки.
6. Повторять для каждого вектора обучающего множества шаги 2-5, пока ошибка обучения нейронной сети на всём множестве не достигнет уровня, который является приемлемым.
Виды обучения сети по методу обратного распространения
Сегодня существует много модификаций алгоритма обратного распространения ошибки. Возможно обучение не «по шагам» (выходная ошибка вычисляется, веса корректируются на каждом примере), а «по эпохам» в offline-режиме (изменения весовых коэффициентов происходит после подачи на вход нейросети всех примеров обучающего множества, а ошибка обучения neural сети усредняется по всем примерам).
Обучение «по эпохам» более устойчиво к выбросам и аномальным значениям целевой переменной благодаря усреднению ошибки по многим примерам. Зато в данном случае увеличивается вероятность «застревания» в локальных минимумах. При обучении «по шагам» такая вероятность меньше, ведь применение отдельных примеров создаёт «шум», «выталкивающий» алгоритм обратного распространения из ям градиентного рельефа.
Преимущества и недостатки метода
К плюсам можно отнести простоту в реализации и устойчивость к выбросам и аномалиям в данных, и это основные преимущества. Но есть и минусы:
• неопределенно долгий процесс обучения;
• вероятность «паралича сети» (при больших значениях рабочая точка функции активации попадает в область насыщения сигмоиды, а производная величина приближается к 0, в результате чего коррекции весов почти не происходят, а процесс обучения «замирает»;
• алгоритм уязвим к попаданию в локальные минимумы функции ошибки.
Значение метода обратного распространения
Появление алгоритма стало знаковым событием и положительно отразилось на развитии нейросетей, ведь он реализует эффективный с точки зрения вычислительных процессов способ обучения многослойного персептрона. В то же самое время, было бы неправильным сказать, что алгоритм предлагает наиболее оптимальное решение всех потенциальных проблем. Зато он действительно развеял пессимизм относительно машинного обучения многослойных машин, который воцарился после публикации в 1969 году работы американского учёного с фамилией Минский.
Источники:
— «Алгоритм обратного распространения ошибки»;
— «Back propagation algorithm».